设计简介
摘 要
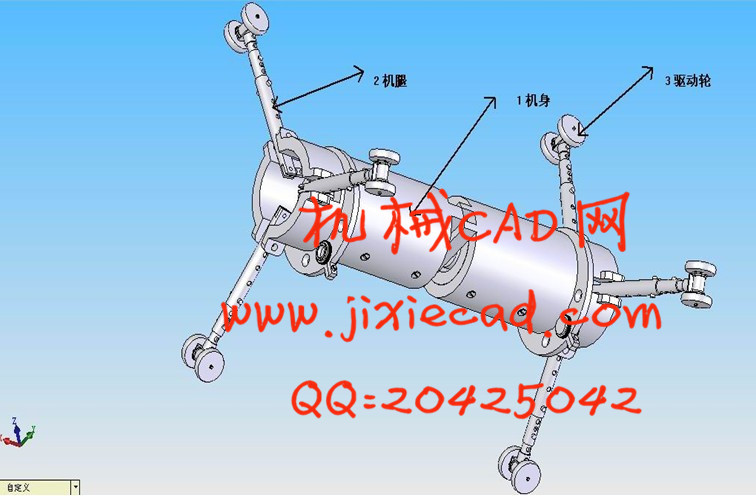
本课题是在对管道爬行器的结构和运动研究分析的基础上。本次设计在Solidworks的基础上构建管道爬行器的若干套三维造型,然后依据要求进行选择。最终方案采用列车连接结构,伸缩结构和“伞”型结构,以适应管道内部的弯道和大范围内径变化管道。通过电气控制,使各电机顺序动作以完成通过十字型和丁字型等较复杂的管道,通过新型吊环的调节始终保持摄像装置与水平面的平行。对管道爬行器的控制要求,采用常规的电气控制分析方法设计电气部分的控制电路,最终方案采用人工控制电机的顺序动作进行管道内的转弯,里程计反馈信息与管道工程图相结合的方法来进行爬行器的定位。为研究管道爬行器打下了一定的基础。
关键词:自适应性,伸缩结构,内径变化,新型吊环,Solidworks
The research and design of piping crawl robot
Abstract
The question for discussion base on the structure of piping crawl robot an-d the moving investigation'analyze. This project bases on Solidworks to concei-ve some 3D sculpt of crawl r-obot, then by requestion carry through choose. The final scheme adopt the structure about train and flex structure and umbrellastructure, for the sake of adapting tothe pipeline that can change radius in gr-eat range. And succeed overpassing crossmodel and t-shaped model complicatedpiping by the sequentially-operation of the electric motor ,and always can keepparallel state between vidicon setting and horizontalgeby adjusting by the new
fiying rings system.Gave the request for the contral of piping crawl robot. Ad-opt nomothetic approach about electrical control analysis for control circuit des-ign ofelectric parts.The final project adopt the manual control the electr-ic mot-or’s sequentially-operating make the machine pass the curved conduit.To adopt the way which use milemeter feedback information couple with piping’s sched-ule drawing for allocation.The paper lays the theoretic foundation for research piping crawl robot
Keywords: From the adaptability, Flexible structure, Inside the path variety,New fiying rings system,Solidworks
目 录
1 绪论 1
2 设计方案初步分析 2
2.1 无线控制与有线控制的选择 2
2.1.1 有线控制及拖拽 2
2.1.2 非拖曳 2
2.2 驱动方式选择 2
2.2.1 轮式爬行 2
2.2.2 履带爬行 3
2.3 姿态调整的选择 3
2.3.1 加传感器的关节进行调整 3
2.3.2 利用吊篮方式进行调整 4
2.3.3 采用新式吊篮进行调整 4
2.4 自适应分析 4
2.4.1 伸缩臂长和加弹簧方式 5
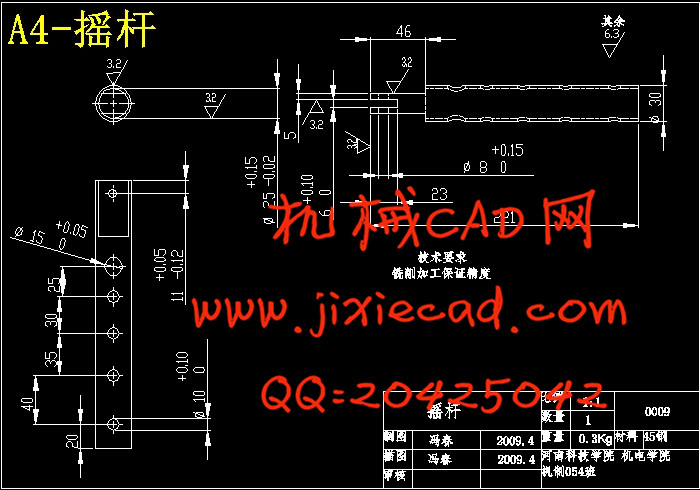
2.4.2 伸缩臂长和“伞”型摇杆 5
2.5 方案的基本确定 5
3 方案一的设计与分析 5
3.1 机身的设计 6
3.2 机腿的设计 6
3.2.1 伸缩单元 7
3.2.2 变长单元 8
3.2.3 关节单元 8
3.3 驱动轮的设计 8
3.4 方案一的分析 9
4 方案二的设计与分析 9
4.1 机身的设计 9
4.2 机身内部传动结构设计 9
4.3 进给螺杆与螺母的设计 10
4.4 吊篮的设计 10
4.5 机腿的设计 11
4.6 方案二的分析 11
5 方案三的设计与分析 12
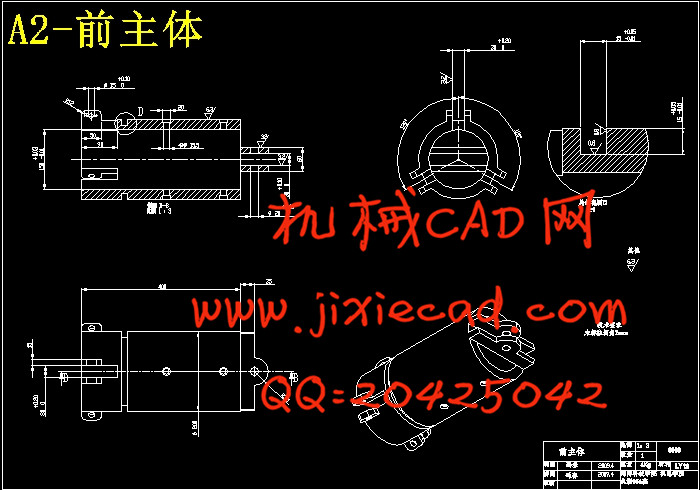
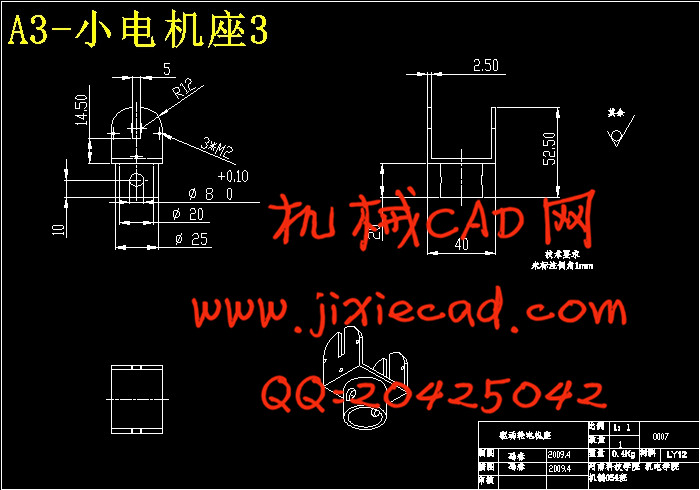
5.1 机身的设计 12
5.2 机身内部传动机构的设计 13
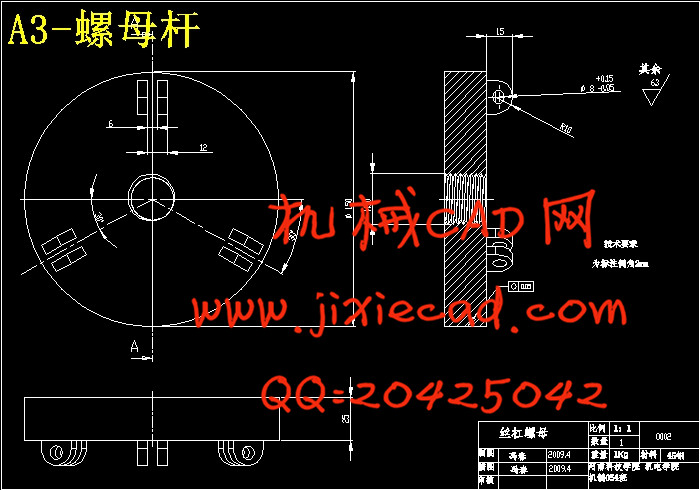
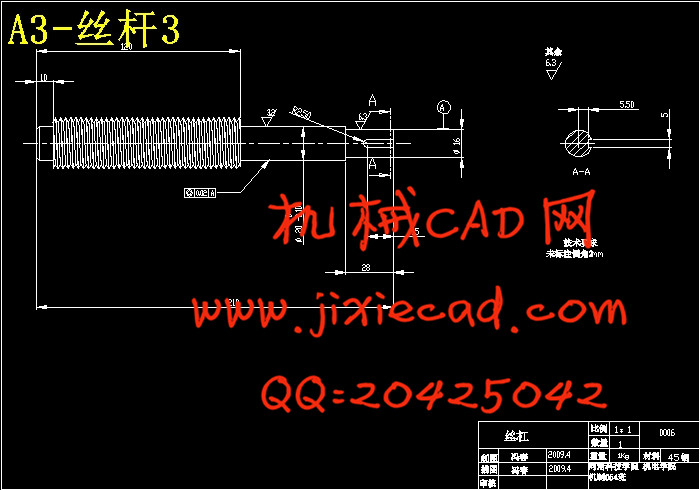
5.2.1 进给丝杠和螺母的设计 13
5.2.2 选择联轴器 17
5.2.3 选择键 17
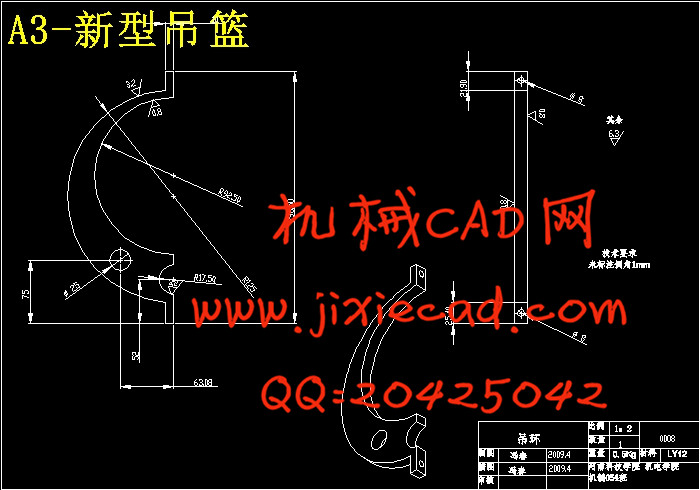
5.3 吊环的设计 18
5.4 轴承的设计 18
5.5 机腿的设计 19
5.6 驱动轮的设计 19
5.7 管道爬行的实现 20
5.8 管道内路口转弯的实现 20
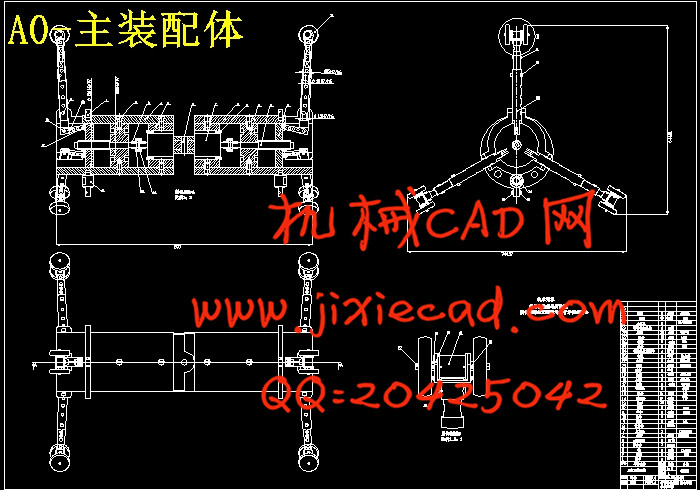
5.9 总体装配体设计 21
6 管道爬行机器人的功能分析 21
7 管道爬行机器人的动作分析 22
8 电气控制基本元器件的选取 22
8.1 电机的参数计算与选取 22
8.1.2 驱动轮电机的参数计算 22
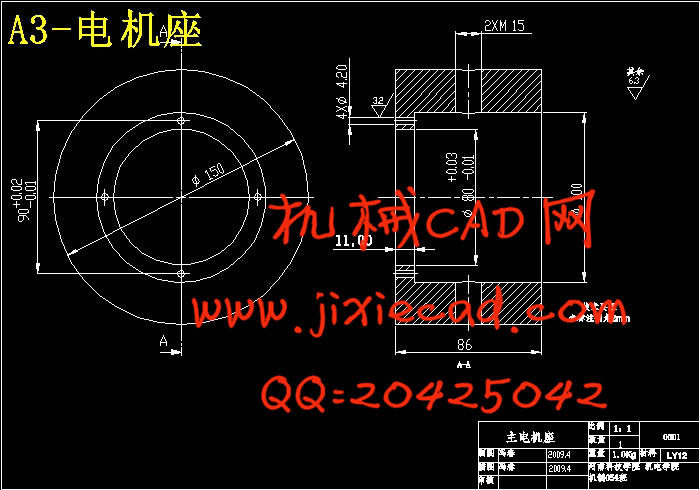
8.1.3 主电机参数计算 23
8.1.4 机器人动力源的选取 24
8.2 电源的选取 24
8.3 电机调速元件的选取 25
8.3.1 串联电阻调速方法的实现 25
8.3.2 新型调节脉宽PWM型调速的实现 26
8.3.3电机调速方法的确定及元件的确定 27
9 电路设计 28
9.1 轮足电机动作的正转与反转的电路设计 28
9.2 前后伞足的张开闭合电路设计 28
9.3 电机部分总电路设计 29
9.4 电机顺序动作的电路设计 30
9.4.1 人为控制 30
9.4.2 逻辑控制 30
9.4.3 单片机/PLC进行自动控制 31
9.5 照明系统的电路设计 32
9.6 管道内机器人定位系统(PDPS)的设计 33
9.6.1 爬行器管道内定位方案的提出与分析 33
9.6.2 机器人定位系统部件的选择与设计 35
10 结论 36
11 结束语 37
致谢 38
参考文献 38
本课题是在对管道爬行器的结构和运动研究分析的基础上。本次设计在Solidworks的基础上构建管道爬行器的若干套三维造型,然后依据要求进行选择。最终方案采用列车连接结构,伸缩结构和“伞”型结构,以适应管道内部的弯道和大范围内径变化管道。通过电气控制,使各电机顺序动作以完成通过十字型和丁字型等较复杂的管道,通过新型吊环的调节始终保持摄像装置与水平面的平行。对管道爬行器的控制要求,采用常规的电气控制分析方法设计电气部分的控制电路,最终方案采用人工控制电机的顺序动作进行管道内的转弯,里程计反馈信息与管道工程图相结合的方法来进行爬行器的定位。为研究管道爬行器打下了一定的基础。
关键词:自适应性,伸缩结构,内径变化,新型吊环,Solidworks
The research and design of piping crawl robot
Abstract
The question for discussion base on the structure of piping crawl robot an-d the moving investigation'analyze. This project bases on Solidworks to concei-ve some 3D sculpt of crawl r-obot, then by requestion carry through choose. The final scheme adopt the structure about train and flex structure and umbrellastructure, for the sake of adapting tothe pipeline that can change radius in gr-eat range. And succeed overpassing crossmodel and t-shaped model complicatedpiping by the sequentially-operation of the electric motor ,and always can keepparallel state between vidicon setting and horizontalgeby adjusting by the new
fiying rings system.Gave the request for the contral of piping crawl robot. Ad-opt nomothetic approach about electrical control analysis for control circuit des-ign ofelectric parts.The final project adopt the manual control the electr-ic mot-or’s sequentially-operating make the machine pass the curved conduit.To adopt the way which use milemeter feedback information couple with piping’s sched-ule drawing for allocation.The paper lays the theoretic foundation for research piping crawl robot
Keywords: From the adaptability, Flexible structure, Inside the path variety,New fiying rings system,Solidworks
目 录
1 绪论 1
2 设计方案初步分析 2
2.1 无线控制与有线控制的选择 2
2.1.1 有线控制及拖拽 2
2.1.2 非拖曳 2
2.2 驱动方式选择 2
2.2.1 轮式爬行 2
2.2.2 履带爬行 3
2.3 姿态调整的选择 3
2.3.1 加传感器的关节进行调整 3
2.3.2 利用吊篮方式进行调整 4
2.3.3 采用新式吊篮进行调整 4
2.4 自适应分析 4
2.4.1 伸缩臂长和加弹簧方式 5
2.4.2 伸缩臂长和“伞”型摇杆 5
2.5 方案的基本确定 5
3 方案一的设计与分析 5
3.1 机身的设计 6
3.2 机腿的设计 6
3.2.1 伸缩单元 7
3.2.2 变长单元 8
3.2.3 关节单元 8
3.3 驱动轮的设计 8
3.4 方案一的分析 9
4 方案二的设计与分析 9
4.1 机身的设计 9
4.2 机身内部传动结构设计 9
4.3 进给螺杆与螺母的设计 10
4.4 吊篮的设计 10
4.5 机腿的设计 11
4.6 方案二的分析 11
5 方案三的设计与分析 12
5.1 机身的设计 12
5.2 机身内部传动机构的设计 13
5.2.1 进给丝杠和螺母的设计 13
5.2.2 选择联轴器 17
5.2.3 选择键 17
5.3 吊环的设计 18
5.4 轴承的设计 18
5.5 机腿的设计 19
5.6 驱动轮的设计 19
5.7 管道爬行的实现 20
5.8 管道内路口转弯的实现 20
5.9 总体装配体设计 21
6 管道爬行机器人的功能分析 21
7 管道爬行机器人的动作分析 22
8 电气控制基本元器件的选取 22
8.1 电机的参数计算与选取 22
8.1.2 驱动轮电机的参数计算 22
8.1.3 主电机参数计算 23
8.1.4 机器人动力源的选取 24
8.2 电源的选取 24
8.3 电机调速元件的选取 25
8.3.1 串联电阻调速方法的实现 25
8.3.2 新型调节脉宽PWM型调速的实现 26
8.3.3电机调速方法的确定及元件的确定 27
9 电路设计 28
9.1 轮足电机动作的正转与反转的电路设计 28
9.2 前后伞足的张开闭合电路设计 28
9.3 电机部分总电路设计 29
9.4 电机顺序动作的电路设计 30
9.4.1 人为控制 30
9.4.2 逻辑控制 30
9.4.3 单片机/PLC进行自动控制 31
9.5 照明系统的电路设计 32
9.6 管道内机器人定位系统(PDPS)的设计 33
9.6.1 爬行器管道内定位方案的提出与分析 33
9.6.2 机器人定位系统部件的选择与设计 35
10 结论 36
11 结束语 37
致谢 38
参考文献 38