设计简介
蛇形搜救机器人的原理机构设计
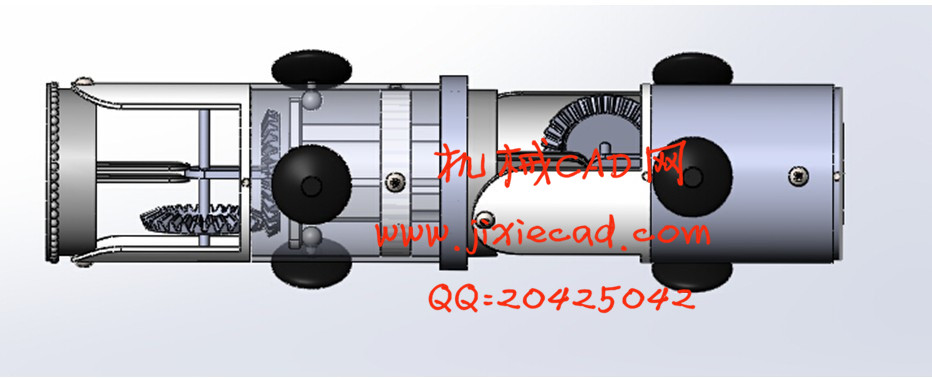
摘要:本设计是一种可携带的齿轮式蛇形搜救机器人,它集成了机械工程、电子技术、智能控制、计算机科学等多科领域先进研究成果,在救援中可用于环境勘探、破障、目标指示跟踪,可以为救援人员提供有效的信息以便做出最有效的措施。本论文的研究目的是设计机构新颖、具有独创性、可携带抗冲击的智能移动机器人。
关键词:蛇形搜救机器人;三维仿真;轮子移动
The Principle of Serpentine Search and Rescue Robot Mechanism Design
Abstract: This design is a kind of portable gear type serpentine, search and rescue robot, it integrates mechanical engineering, electronic technology, intelligent control, computer science, and other areas of the multidisciplinary advanced research achievements, can be used in the environment of exploration in the rescue, to break the barrier, tracking target designation, can provide effective information for rescue workers to make the most effective measures. The research purpose of this paper is to design novel, original, portable resistance to impact of intelligent mobile robot.
Key Words: Snake search and rescue robot; 3 d simulation; The wheel moving
目 录
摘要 1
Abstract 1
引言 2
一、绪论 2
1.1背景及意义 2
1.1 国内外发展趋势及研究状况 3
二、设计方案 5
2.1 机构设计 5
2.2 驱动设计 ................................................................................................................................................6
2.2 基本尺寸 7
三、蛇形机器人的运动分析 7
3.1 蛇形机器人蠕动分析 8
3.2 蛇形机器人蜿蜒运动 10
3.3 蛇形机器人侧向运动 11
3.4 蛇形机器人侧向翻滚 12
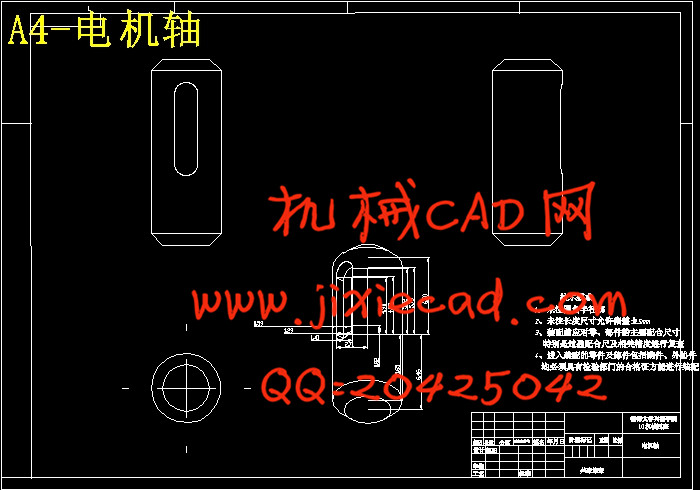
四、蛇形机器人的齿轮设计 12
4.1.1确定转速……………………………………………………………………………………12
4.1.2确定齿数……………………………………………………………………………………12
4.1.3确定齿轮马达排量…………………………………………………………………………12
4.1.4确定齿轮模数………………………………………………………………………………13
4.1.5 确定齿宽…………………………………………………………………………………..13
4.1.6齿轮参数表………………………………………………………………………………. .13
4.2 齿面接触强度校核………………………………………………………………….………15
4.2.1使用系数Ka的确定……………………………………………………………….………15
4.2.2 齿轮精度的确定…………………………………………………………………..………15
4.2.3动载系数Kv的确定…………………………………………………..………….….……16
4.2.4齿向载荷分布系数的确定……………………………………………..……….…………16
4.2.5齿间载荷分配系数的确定……………………………………………….……….………16
4.2.6弹性系数Ze……………………………………………………………….………………16
4.2.7动载系数K…………………………………………………………………………………16
4.2.8齿宽系数……………………………………………………………………………….…17
4.2.9接触疲劳强度极限………………………………………………………………….…… ..17
4.2.10计算循环应力次数………………………………………………………………..……....17
4.2.11接触疲劳寿命系数……………………………………………………………….…….…17
4.2.12齿轮的输入功率………………………………………………………………….……....16
4.2.13齿轮传递的转矩………………………………………………………………....……….17
4.2.14计算接触疲劳强度…………………………………………………………..…...………18
4.3 齿面弯曲强度校核……………………………………………………………..….….…….18
4.3.1弯曲疲劳强度极限……………………………………………………………..…….....…18
4.3.2弯曲疲劳寿命系数…………………………………………………………..…….………18
4.3.3计算弯曲疲劳许用应力……………………………………………………..…….………19
4.3.4载荷系数…………………………………………………………………...………………19
4.3.5齿形系数及应力校正系数………………………………………………..….……………19
4.3.6 计算齿根危险截面弯曲强度……………………………………………..………………19
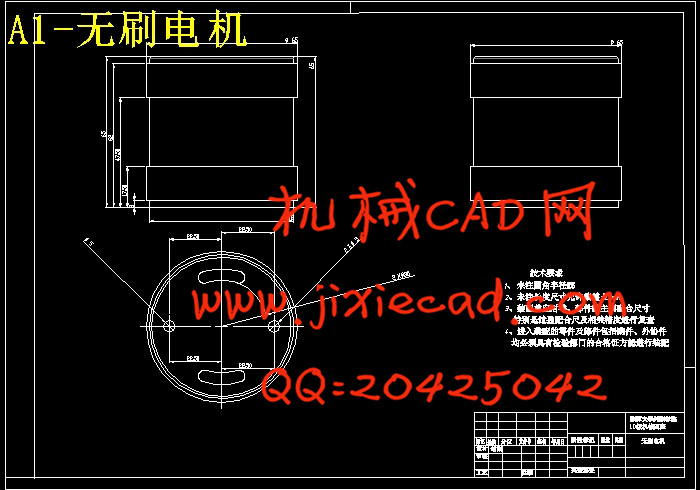
五、蛇形机器人电机的选择...................................................................................................20
六、蛇形机器人的导航分析 21
七、工作原理分析 21
八、主要创新点 22
九、应用前景分析 22
致谢……………………………………………………………………………………………23
参考文献..................................................................................24
摘要:本设计是一种可携带的齿轮式蛇形搜救机器人,它集成了机械工程、电子技术、智能控制、计算机科学等多科领域先进研究成果,在救援中可用于环境勘探、破障、目标指示跟踪,可以为救援人员提供有效的信息以便做出最有效的措施。本论文的研究目的是设计机构新颖、具有独创性、可携带抗冲击的智能移动机器人。
关键词:蛇形搜救机器人;三维仿真;轮子移动
The Principle of Serpentine Search and Rescue Robot Mechanism Design
Abstract: This design is a kind of portable gear type serpentine, search and rescue robot, it integrates mechanical engineering, electronic technology, intelligent control, computer science, and other areas of the multidisciplinary advanced research achievements, can be used in the environment of exploration in the rescue, to break the barrier, tracking target designation, can provide effective information for rescue workers to make the most effective measures. The research purpose of this paper is to design novel, original, portable resistance to impact of intelligent mobile robot.
Key Words: Snake search and rescue robot; 3 d simulation; The wheel moving
目 录
摘要 1
Abstract 1
引言 2
一、绪论 2
1.1背景及意义 2
1.1 国内外发展趋势及研究状况 3
二、设计方案 5
2.1 机构设计 5
2.2 驱动设计 ................................................................................................................................................6
2.2 基本尺寸 7
三、蛇形机器人的运动分析 7
3.1 蛇形机器人蠕动分析 8
3.2 蛇形机器人蜿蜒运动 10
3.3 蛇形机器人侧向运动 11
3.4 蛇形机器人侧向翻滚 12
四、蛇形机器人的齿轮设计 12
4.1.1确定转速……………………………………………………………………………………12
4.1.2确定齿数……………………………………………………………………………………12
4.1.3确定齿轮马达排量…………………………………………………………………………12
4.1.4确定齿轮模数………………………………………………………………………………13
4.1.5 确定齿宽…………………………………………………………………………………..13
4.1.6齿轮参数表………………………………………………………………………………. .13
4.2 齿面接触强度校核………………………………………………………………….………15
4.2.1使用系数Ka的确定……………………………………………………………….………15
4.2.2 齿轮精度的确定…………………………………………………………………..………15
4.2.3动载系数Kv的确定…………………………………………………..………….….……16
4.2.4齿向载荷分布系数的确定……………………………………………..……….…………16
4.2.5齿间载荷分配系数的确定……………………………………………….……….………16
4.2.6弹性系数Ze……………………………………………………………….………………16
4.2.7动载系数K…………………………………………………………………………………16
4.2.8齿宽系数……………………………………………………………………………….…17
4.2.9接触疲劳强度极限………………………………………………………………….…… ..17
4.2.10计算循环应力次数………………………………………………………………..……....17
4.2.11接触疲劳寿命系数……………………………………………………………….…….…17
4.2.12齿轮的输入功率………………………………………………………………….……....16
4.2.13齿轮传递的转矩………………………………………………………………....……….17
4.2.14计算接触疲劳强度…………………………………………………………..…...………18
4.3 齿面弯曲强度校核……………………………………………………………..….….…….18
4.3.1弯曲疲劳强度极限……………………………………………………………..…….....…18
4.3.2弯曲疲劳寿命系数…………………………………………………………..…….………18
4.3.3计算弯曲疲劳许用应力……………………………………………………..…….………19
4.3.4载荷系数…………………………………………………………………...………………19
4.3.5齿形系数及应力校正系数………………………………………………..….……………19
4.3.6 计算齿根危险截面弯曲强度……………………………………………..………………19
五、蛇形机器人电机的选择...................................................................................................20
六、蛇形机器人的导航分析 21
七、工作原理分析 21
八、主要创新点 22
九、应用前景分析 22
致谢……………………………………………………………………………………………23
参考文献..................................................................................24