设计简介
摘 要
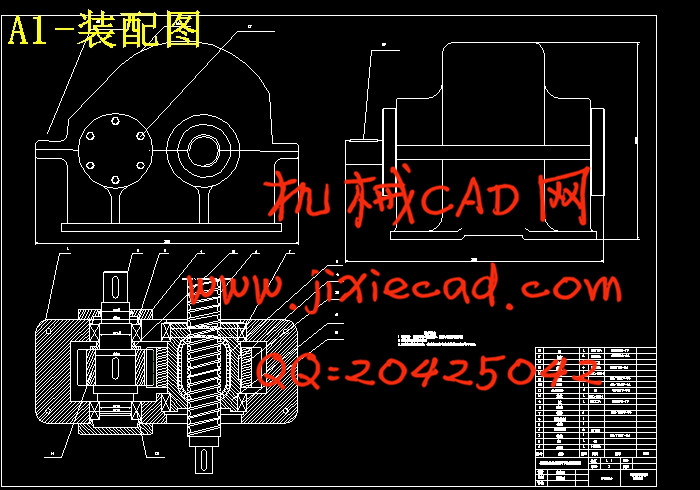
在喷漆行业,人工喷漆严重影响了人的身心健康,制约了生产效率的提高,为避免人在有毒、易燃、易爆的恶劣环境下工作,减少喷漆废品,提高喷漆质量,提高劳动生产率,迫切需要实现喷漆自动化,而喷漆机器人不怕酷热寒暑,不怕辐射和污染,不怕危险,效率高,缩短了生产周期,降低了生产成本,并且保证了喷漆操作在时间和空间上的延续性与连续性,文章首先进行了喷漆机器人传动装置的分析,接着讨论了该机器人的直线伸缩关节,通过工作空间分析进行结构设计,并进行了抗拉、抗剪和刚度校核,给出了惯量匹配、转矩匹配等控制参数的调节计算方法。
关键词:喷漆机器人,直线伸缩关节,结构设计,参数调节
The Design of Linear Expansion Joints of Fuel Tank Painting Robot
Abstract
In the painting industry, artificial painting has a serious impact on people's physical and mental health, and prevents the enhancement of production efficiency, it is urgent to achieve automation in painting. The sprayed painting robot is not afraid of hot summers, radiation, pollution, and danger. It works highly in efficiency, and shortens the cycle and reduces the cost of production, and ensures that the painting operation continuity in time and space. This paper firstly analysizes the painting robot gear, discuss the robot straight telescopic joints, designs the Structural through their working space analysis, then check the tensile, shear stiffness and verification, gives the adjustment calculation of the inertia matching and torque control matching.
Keywords: Painting Robot; Linear telescopic joints; Sructural design; Parameter adjustment
目 录
1 绪论 1
2 总体机构 1
3 工业机器人的技术指标 2
4 结构设计 2
4.1 传动方案的设计 3
4.1.1 电动机的类型和结构形式 3
4.1.2 选择电机容量 3
4.1.3 确定电机转速 4
4.1.4 分配各级传动比 4
4.1.5 计算传动装置的运动和动力参数 4
4.2 传动零件的设计计算 5
4.2.1 按齿面接触疲劳强度计算数值 5
4.2.2 几何尺寸计算 7
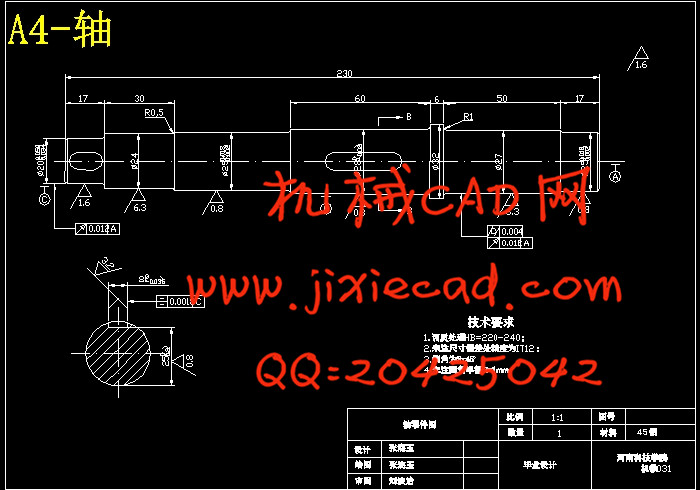
4.3 轴的设计 7
4.3.1 初步确定轴的最小直径 7
4.3.2 轴的结构设计 8
5 直线伸缩关节 9
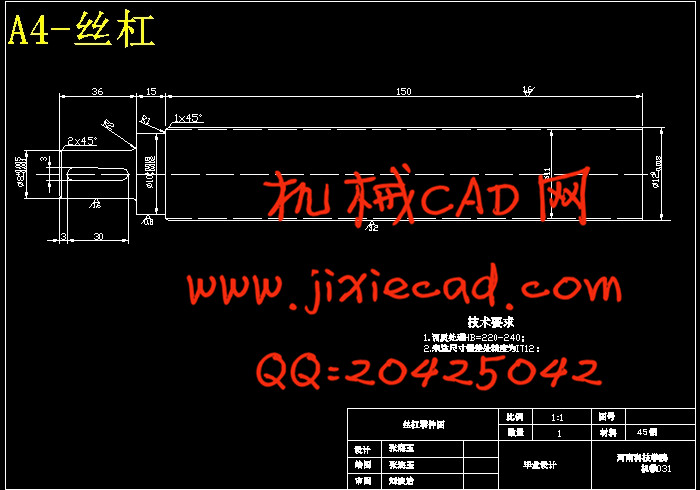
5.1 丝杠的设计 9
5.2 手臂机构尺寸的初步确定 12
5.3 操作机位置与姿态的确定 12
5.4 速度和加速度分析 13
5.5 角速度和角加速度分析 13
6 尺寸优化 13
6.1 初步确定尺寸 13
6.2 设计分析 14
6.2.1 抗拉强度分析 14
6.2.2 抗剪强度条件 14
6.2.3 刚度条件 15
6.2.4 结构尺寸限制 15
7 建立数学模型 15
8 优化计算 16
9 力学分析 17
9.1 惯量匹配 18
9.2 转矩匹配 19
10 旋转摆动关节 19
11 关节控制 20
12 结语 20
致谢 21
参考文献 22
在喷漆行业,人工喷漆严重影响了人的身心健康,制约了生产效率的提高,为避免人在有毒、易燃、易爆的恶劣环境下工作,减少喷漆废品,提高喷漆质量,提高劳动生产率,迫切需要实现喷漆自动化,而喷漆机器人不怕酷热寒暑,不怕辐射和污染,不怕危险,效率高,缩短了生产周期,降低了生产成本,并且保证了喷漆操作在时间和空间上的延续性与连续性,文章首先进行了喷漆机器人传动装置的分析,接着讨论了该机器人的直线伸缩关节,通过工作空间分析进行结构设计,并进行了抗拉、抗剪和刚度校核,给出了惯量匹配、转矩匹配等控制参数的调节计算方法。
关键词:喷漆机器人,直线伸缩关节,结构设计,参数调节
The Design of Linear Expansion Joints of Fuel Tank Painting Robot
Abstract
In the painting industry, artificial painting has a serious impact on people's physical and mental health, and prevents the enhancement of production efficiency, it is urgent to achieve automation in painting. The sprayed painting robot is not afraid of hot summers, radiation, pollution, and danger. It works highly in efficiency, and shortens the cycle and reduces the cost of production, and ensures that the painting operation continuity in time and space. This paper firstly analysizes the painting robot gear, discuss the robot straight telescopic joints, designs the Structural through their working space analysis, then check the tensile, shear stiffness and verification, gives the adjustment calculation of the inertia matching and torque control matching.
Keywords: Painting Robot; Linear telescopic joints; Sructural design; Parameter adjustment
目 录
1 绪论 1
2 总体机构 1
3 工业机器人的技术指标 2
4 结构设计 2
4.1 传动方案的设计 3
4.1.1 电动机的类型和结构形式 3
4.1.2 选择电机容量 3
4.1.3 确定电机转速 4
4.1.4 分配各级传动比 4
4.1.5 计算传动装置的运动和动力参数 4
4.2 传动零件的设计计算 5
4.2.1 按齿面接触疲劳强度计算数值 5
4.2.2 几何尺寸计算 7
4.3 轴的设计 7
4.3.1 初步确定轴的最小直径 7
4.3.2 轴的结构设计 8
5 直线伸缩关节 9
5.1 丝杠的设计 9
5.2 手臂机构尺寸的初步确定 12
5.3 操作机位置与姿态的确定 12
5.4 速度和加速度分析 13
5.5 角速度和角加速度分析 13
6 尺寸优化 13
6.1 初步确定尺寸 13
6.2 设计分析 14
6.2.1 抗拉强度分析 14
6.2.2 抗剪强度条件 14
6.2.3 刚度条件 15
6.2.4 结构尺寸限制 15
7 建立数学模型 15
8 优化计算 16
9 力学分析 17
9.1 惯量匹配 18
9.2 转矩匹配 19
10 旋转摆动关节 19
11 关节控制 20
12 结语 20
致谢 21
参考文献 22