设计简介
定位磨齿专用工作台设计
摘 要
定位磨齿专用工作台机电系统设计是一个开环控制系统,其结构简单,实现方便而且能够保证一定的精度,降低成本,是微机控制技术的最简单的应用。开环控制能充分的利用微机的软件、硬件功能以实现对机床的控制,使机床的加工范围扩大, 进一步提高机床的精度和可靠性。
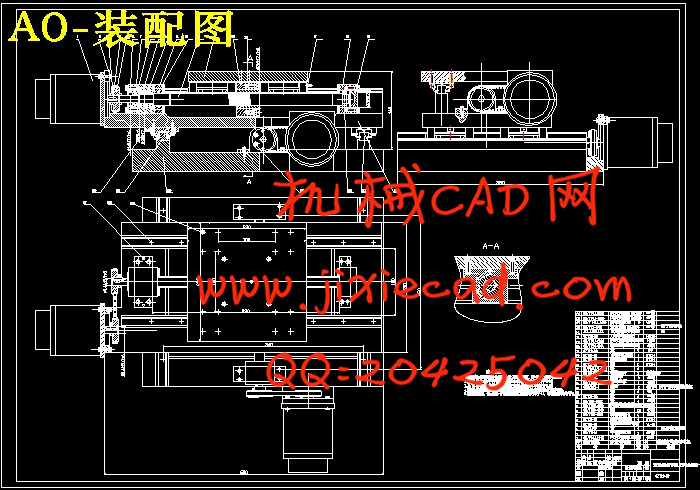
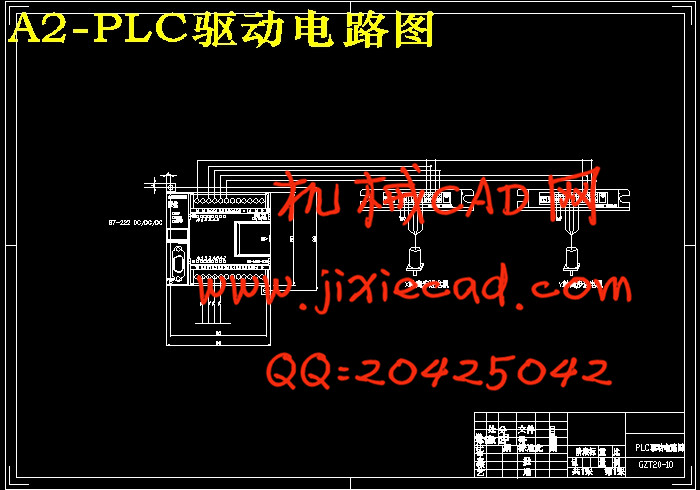
本文机械部分采用步进电动机通过同步齿形带带动滚珠丝杠拖动工作台在直线滚动导轨副上运动,其中,步进电动机选用90BYG22602型号。工作台控制部分以S7-200 PLC为核心,作为主控器;选择步进电机配套驱动器MD-201驱动步进电动机实现加、 减速、急停等操作,从而实现对工作台的控制。
关键词:步进电动机,S7-200 PLC,工作台
Positioning Grinding Teeth Dedicated Workbench Design
Abstract
Summary two-axis CNC Workbench is an open-loop control system for mechanical and electrical systems design, its structure is simple, easy and can guarantee a certain degree of accuracy, reduce costs, is the simplest application of microcomputer control technology. Open-loop control can make full use of computer software and hardware capabilities for control of the machine tool, machine tool machining range of expanded, further improve the accuracy and reliability of machine tools.
Machinery section of this article adopts stepping motor by dragging the table in Timing belt driven ball screw linear rolling guide on movement, of which, step motor selection 90BYG22602 model. Table control section S7-200 PLC microcontroller as the core, select stepping motor drive MD-201-drive stepper motors for operations such as addition, deceleration and emergency stop, enabling control over the table.
Key words: Stepper motors, S7-200 PLC, Workbench
目录
1 绪论 1
1.1 前言 1
1.2 机电一体化系统综述 1
1.2.1机电一体化系统的基本构成 1
1.2.2 机电一体化系统的核心技术 3
1.2.3机电一体化的发展趋势 3
2 总体方案设计 5
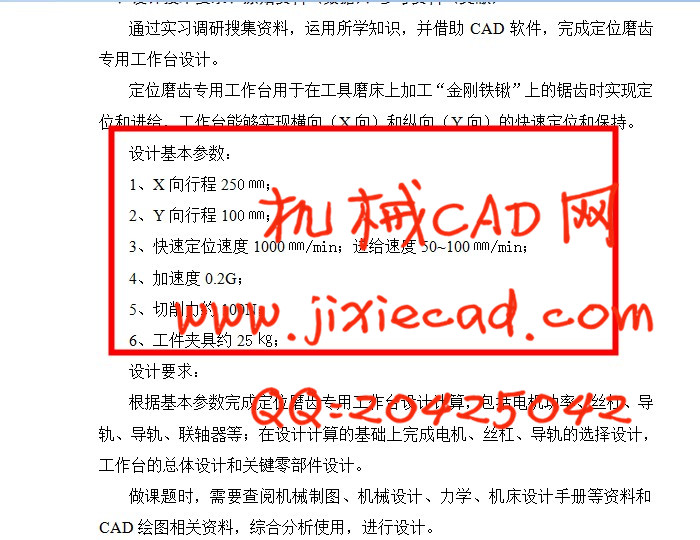
2.1 确定主要参数 5
2.2 工作台的外形尺寸 6
2.3 机械传动部件的选择 7
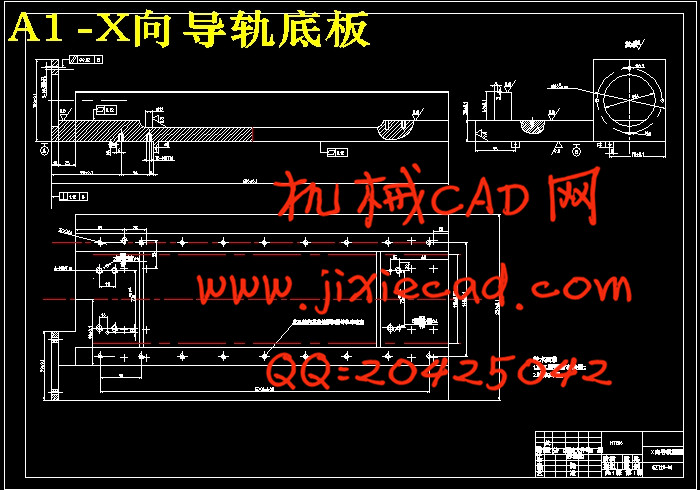
2.3.1导轨副的选用 7
2.3.2丝杠螺母副的选用 7
2.3.3伺服电动机的选用 7
2.3.4控制系统的选用 7
2.4 控制系统的设计 7
2.5系统总体框图 8
3 机械设计部分 9
3.1工作台重量初步估算 9
3.2磨削力的计算 9
3.3滚动导轨的选用 10
3.1.1导轨工作负载计算 10
3.3.2 块承受工作载荷 的计算 11
的计算 11
3.3.3 距离额定寿命L的计算 11
3.4滚珠丝杠的计算和选择 11
3.4.1 最大工作载荷Fm的计算 12
3.4.2最大动工作载荷FQ的计算 12
3.5型号的选择与校核 12
3.5.1规格型号的初选 12
3.5.2 传动效率η的计算 13
3.5.3刚度的验算 13
3.5.4 压杆稳定性校核 14
3.6 步进电动机的计算与选型 14
3.6.1 计算加在步进电动机转轴上的总转动惯量Jeq 14
3.6.2 计算加在步进电动机转轴上的等效负载转矩Teq 15
3.6.3 步进电动机最大静转矩的选定 17
3.6.4 步进电动机的性能校核 17
3.7步进电机同步齿形带的设计 19
3.7.1给出传动要求及原始数据 19
3.7.2选择带的节距 19
3.7.3 确定带轮直径及带的节线长 19
3.7.4 确定带宽 20
4 控制系统硬件设计 22
4.1硬件设计 22
4.1.1主控制器CPU的选择 22
4.1.2 系统结构 22
4.1.3硬件配置 22
4.2 PLC的输入信号与输出信号 23
4.3 系统软件设计 23
4.4 初始化 24
4.5 设置和取消参考点 24
4.6 定位控制 25
4.7 停止电机 25
5 程序和注释 26
6 系统误差分析 31
6.1误差的来源 31
6.2控制系统误差 31
6.2.1 步进电机失步原因和解决办法 31
6.2.2 步进电机越步原因和解决办法 32
6.2.3本设计中采用的方法 32
6.3进给系统的误差 32
设计总结 34
致 谢 35
参考文献 36
摘 要
定位磨齿专用工作台机电系统设计是一个开环控制系统,其结构简单,实现方便而且能够保证一定的精度,降低成本,是微机控制技术的最简单的应用。开环控制能充分的利用微机的软件、硬件功能以实现对机床的控制,使机床的加工范围扩大, 进一步提高机床的精度和可靠性。
本文机械部分采用步进电动机通过同步齿形带带动滚珠丝杠拖动工作台在直线滚动导轨副上运动,其中,步进电动机选用90BYG22602型号。工作台控制部分以S7-200 PLC为核心,作为主控器;选择步进电机配套驱动器MD-201驱动步进电动机实现加、 减速、急停等操作,从而实现对工作台的控制。
关键词:步进电动机,S7-200 PLC,工作台
Positioning Grinding Teeth Dedicated Workbench Design
Abstract
Summary two-axis CNC Workbench is an open-loop control system for mechanical and electrical systems design, its structure is simple, easy and can guarantee a certain degree of accuracy, reduce costs, is the simplest application of microcomputer control technology. Open-loop control can make full use of computer software and hardware capabilities for control of the machine tool, machine tool machining range of expanded, further improve the accuracy and reliability of machine tools.
Machinery section of this article adopts stepping motor by dragging the table in Timing belt driven ball screw linear rolling guide on movement, of which, step motor selection 90BYG22602 model. Table control section S7-200 PLC microcontroller as the core, select stepping motor drive MD-201-drive stepper motors for operations such as addition, deceleration and emergency stop, enabling control over the table.
Key words: Stepper motors, S7-200 PLC, Workbench
目录
1 绪论 1
1.1 前言 1
1.2 机电一体化系统综述 1
1.2.1机电一体化系统的基本构成 1
1.2.2 机电一体化系统的核心技术 3
1.2.3机电一体化的发展趋势 3
2 总体方案设计 5
2.1 确定主要参数 5
2.2 工作台的外形尺寸 6
2.3 机械传动部件的选择 7
2.3.1导轨副的选用 7
2.3.2丝杠螺母副的选用 7
2.3.3伺服电动机的选用 7
2.3.4控制系统的选用 7
2.4 控制系统的设计 7
2.5系统总体框图 8
3 机械设计部分 9
3.1工作台重量初步估算 9
3.2磨削力的计算 9
3.3滚动导轨的选用 10
3.1.1导轨工作负载计算 10
3.3.2 块承受工作载荷
3.3.3 距离额定寿命L的计算 11
3.4滚珠丝杠的计算和选择 11
3.4.1 最大工作载荷Fm的计算 12
3.4.2最大动工作载荷FQ的计算 12
3.5型号的选择与校核 12
3.5.1规格型号的初选 12
3.5.2 传动效率η的计算 13
3.5.3刚度的验算 13
3.5.4 压杆稳定性校核 14
3.6 步进电动机的计算与选型 14
3.6.1 计算加在步进电动机转轴上的总转动惯量Jeq 14
3.6.2 计算加在步进电动机转轴上的等效负载转矩Teq 15
3.6.3 步进电动机最大静转矩的选定 17
3.6.4 步进电动机的性能校核 17
3.7步进电机同步齿形带的设计 19
3.7.1给出传动要求及原始数据 19
3.7.2选择带的节距 19
3.7.3 确定带轮直径及带的节线长 19
3.7.4 确定带宽 20
4 控制系统硬件设计 22
4.1硬件设计 22
4.1.1主控制器CPU的选择 22
4.1.2 系统结构 22
4.1.3硬件配置 22
4.2 PLC的输入信号与输出信号 23
4.3 系统软件设计 23
4.4 初始化 24
4.5 设置和取消参考点 24
4.6 定位控制 25
4.7 停止电机 25
5 程序和注释 26
6 系统误差分析 31
6.1误差的来源 31
6.2控制系统误差 31
6.2.1 步进电机失步原因和解决办法 31
6.2.2 步进电机越步原因和解决办法 32
6.2.3本设计中采用的方法 32
6.3进给系统的误差 32
设计总结 34
致 谢 35
参考文献 36