设计简介
摘 要
随着当代社会科学技术的迅猛发展,无线遥控领域作为一个新兴的课题,逐渐进入科学研究业的视野,在当今的社会中也有着越来越广泛的应用。无论是在娱乐生活、国防科技乃至文体教育等方面的应用,都有其一定的研究及利用开发的价值。
本文介绍了与遥控小车相关的机器人领域以及智能车辆领域的研究现状,对遥控小车的设计与结构做了系统的介绍,给出了遥控小车的概要设计。
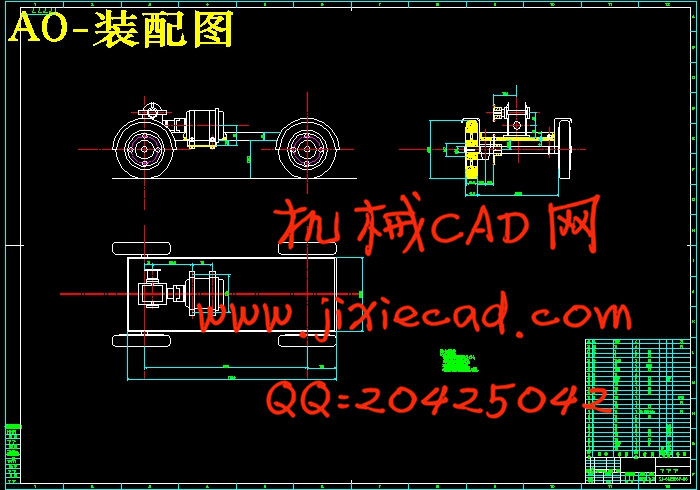
详细介绍了遥控小车运动控制系统设计与实现。重点就遥控车的机械结构进行了研究。辅助针对智能小车运动控制系统的非线性界环境的不确定性,利用模糊逻辑推理的方法,允许知识边界的不确定性,
本次还通过对遥控车控制部分以及传动部分的了解,我们能更好地了解遥控车设计中所涉及的诸多问题。希望能够通过自身的研究实现其智能化,做出一定的成果,给出给定的条件来达到无线控制,以及结构的问题,以便满足其总体设计。
关键词: 控制机构 传动机构 多传感器数据融合 模糊控制Abstract
随着当代社会科学技术的迅猛发展,无线遥控领域作为一个新兴的课题,逐渐进入科学研究业的视野,在当今的社会中也有着越来越广泛的应用。无论是在娱乐生活、国防科技乃至文体教育等方面的应用,都有其一定的研究及利用开发的价值。
本文介绍了与遥控小车相关的机器人领域以及智能车辆领域的研究现状,对遥控小车的设计与结构做了系统的介绍,给出了遥控小车的概要设计。
详细介绍了遥控小车运动控制系统设计与实现。重点就遥控车的机械结构进行了研究。辅助针对智能小车运动控制系统的非线性界环境的不确定性,利用模糊逻辑推理的方法,允许知识边界的不确定性,
本次还通过对遥控车控制部分以及传动部分的了解,我们能更好地了解遥控车设计中所涉及的诸多问题。希望能够通过自身的研究实现其智能化,做出一定的成果,给出给定的条件来达到无线控制,以及结构的问题,以便满足其总体设计。
关键词: 控制机构 传动机构 多传感器数据融合 模糊控制Abstract
In contemporary society with the rapid development of science and technology, wireless remote areas as a new subject, gradually entered the field of scientific research, industry in today's society has more and more widely. Whether in the entertainment, defense science, technology and education style and application, has its certain research and exploitation of value.
This car is introduced and the remote areas and related robot of intelligent vehicle research status of remote control system of basic car technology is introduced, the system is given based on the summary of remote car design.
Detailed introduces remote control system design and the car. The remote control of mechanical structure are studied. Auxiliary motion control system for intelligent car nonlinear boundary environmental uncertainty, using the method of fuzzy logic reasoning, allowing the uncertainty of knowledge boundary,
This is based on remote control and drive car parts, we can better understand the remote car design problems involved. Hope to achieve its own research through a certain achievement, intelligent, given the conditions to achieve wireless control, and the structure of the problem, in order to meet the overall design.
Keywords: control agencies transmission mechanism of multi-sensor data fusion fuzzy contro
目 录This car is introduced and the remote areas and related robot of intelligent vehicle research status of remote control system of basic car technology is introduced, the system is given based on the summary of remote car design.
Detailed introduces remote control system design and the car. The remote control of mechanical structure are studied. Auxiliary motion control system for intelligent car nonlinear boundary environmental uncertainty, using the method of fuzzy logic reasoning, allowing the uncertainty of knowledge boundary,
This is based on remote control and drive car parts, we can better understand the remote car design problems involved. Hope to achieve its own research through a certain achievement, intelligent, given the conditions to achieve wireless control, and the structure of the problem, in order to meet the overall design.
Keywords: control agencies transmission mechanism of multi-sensor data fusion fuzzy contro
第一章 绪论 1
1.1选题背景 1
1.2课题在理论和实际应用方面的价值 2
1.3主要研究内容 4
第二章 遥控智能小车的研究现状 5
2.1移动机器人的发展 6
2.1.1国外移动机器人的发展 6
2.1.2国内移动机器人的发展 7
2.2智能车辆的研究 8
2.2.1国外智能车辆的研究 8
2.2.2国内智能车辆的研究 9
第三章 遥控智能小车的关键技术 10
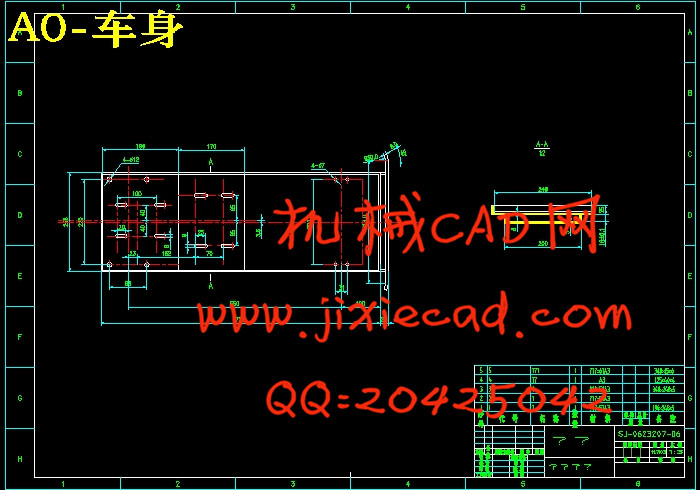
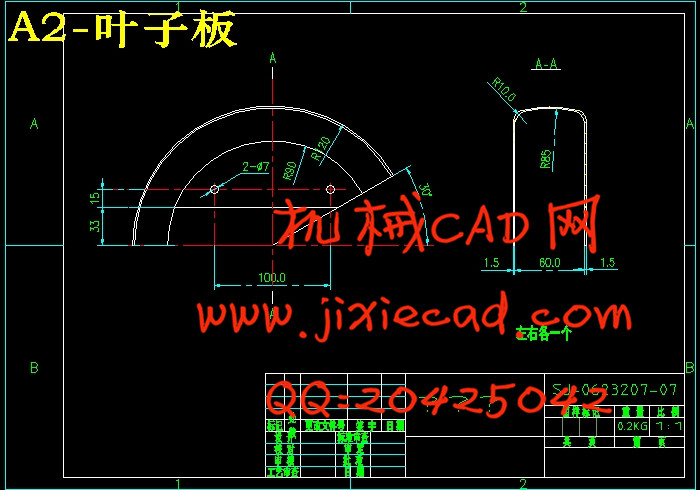
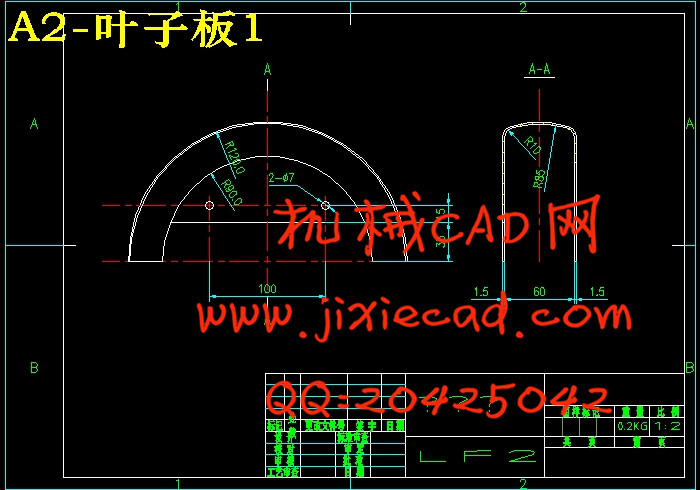
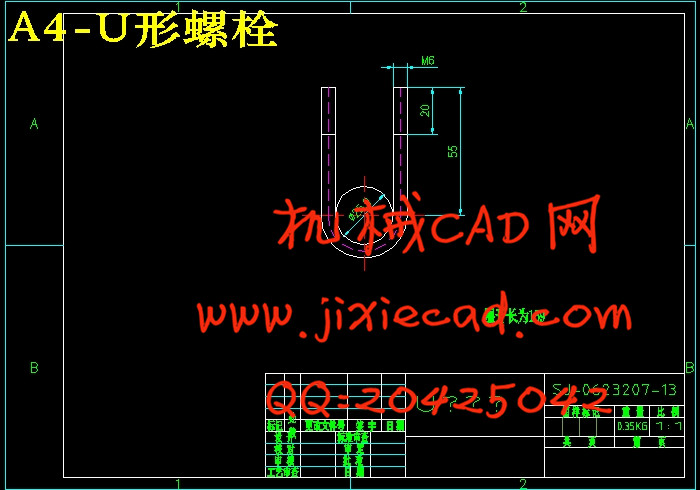
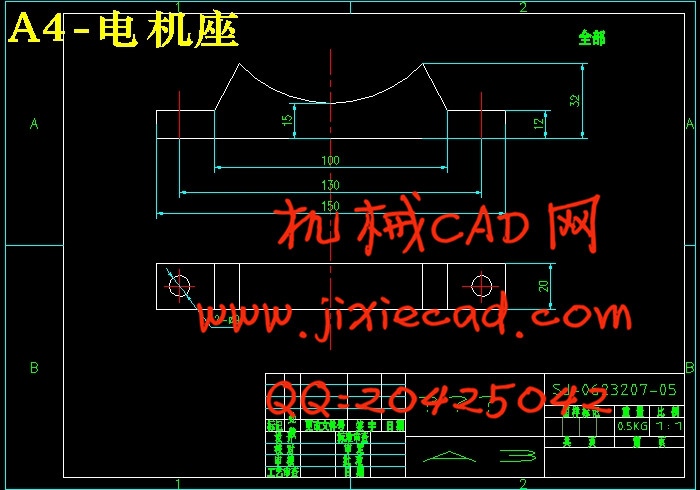
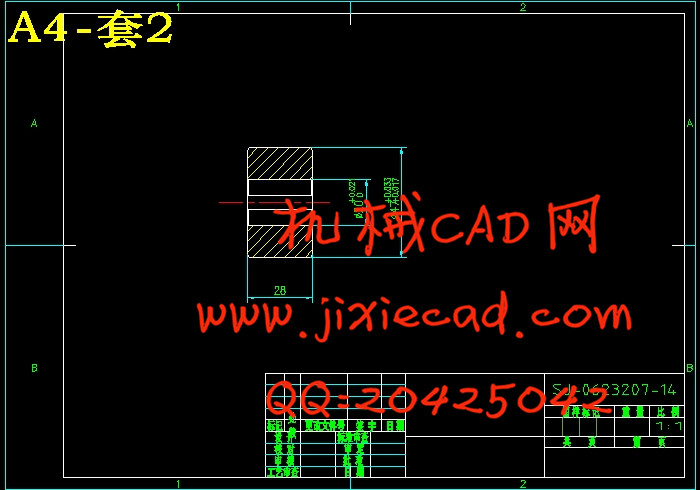
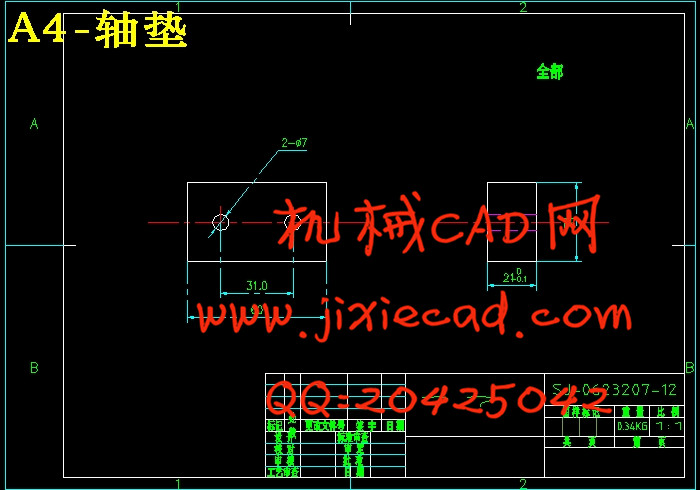
3.1机械结构 10
3.1.1车身设计介绍 12
3.1.2车身设计技术要求 13
3.1.3 电机的的选择 14
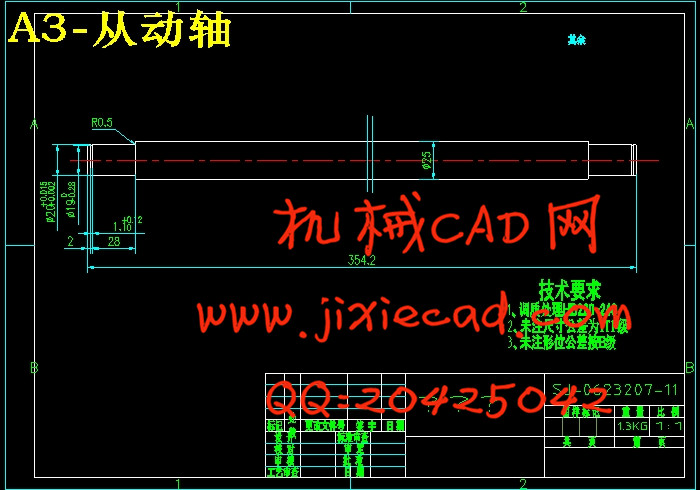
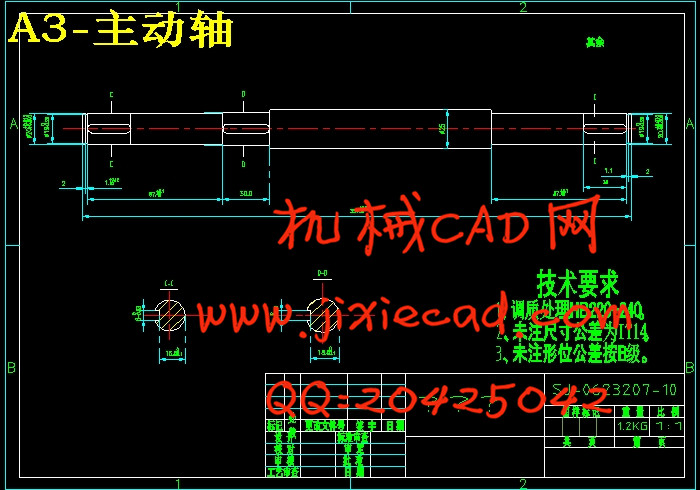
3.1.4 主轴的选择与校核 15
3.2多传感器系统与数据融合 21
3.3智能技术 22
第四章 遥控小车的硬件系统 24
4.1总体设计 25
4.2处理器 25
4.2.1常用处理器及其特点 25
4.2.2处理器的选择 25
4.3传感器 26
4.3.1位置传感器 27
4.3.2加速度传感器 27
4.3.3红外传感器 27
4.3.4超声传感器 28
4.3.5视觉系统 30
第五章 车体的维护与保养 32
结论 34
致谢 35
参考文献 36