设计简介
内容摘要
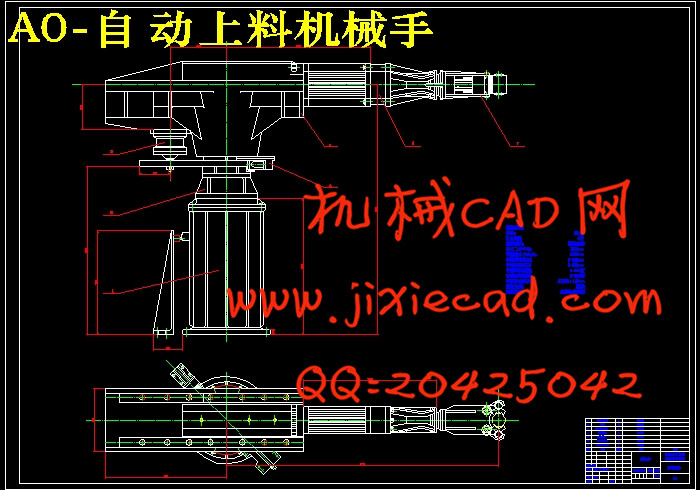
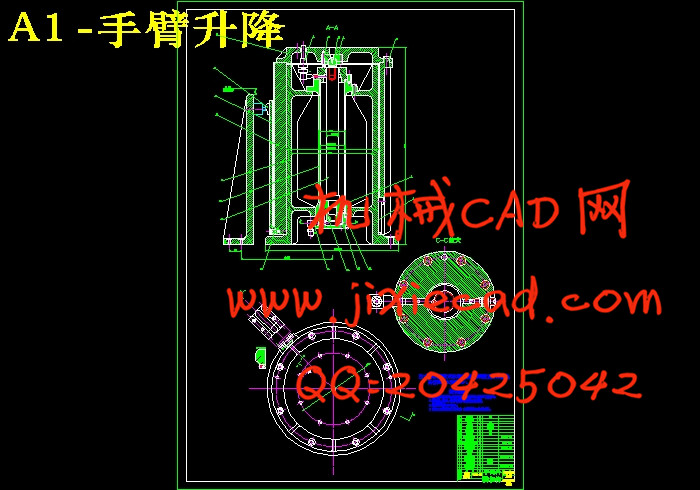
工业机械手是一种在工业生产中代替人执行危险或者重复工作的自动化装置,按照设定的程序、轨迹和要求执行抓取、搬运工作或操持工具或进行操作。它主要有执行机构、驱动系统、和控制系统组成。本文简要介绍了机械手与其它设备的配置关系及工作过程,并对机械手的动作进行了分析,详细论述了机械手总体方案的设计,特别是对实现预期要求动作的各种方案进行了比较分析,进而得出最终方案。根据手臂的动作要求,采用圆柱坐标型机械手;机械手的自由度数为四个,它们是大臂的升降和回转运动,小臂的伸缩运动,手腕的回转运动;机械手手部结构采用两支点回转型;机械手驱动方式采用液压驱动。控制方式为点位程序控制。本次设计主要进行大臂升降及回转机构设计、手臂及伸缩结构设计、手部结构设计,重点进行大臂升降及回转设计并且对液压系统进行理论分析和比较。
关 键 词:双作用式油缸; 点位控制; 液压系统 ; 结构设计
Abstract
Industrial manipulator is a kind of automatic devices, which substitutes people to carry out dangerous or duplicate work. It complies crawler tracks、handling work or manage or operate a tool according to set procedures and requirements. It is constituted with executive body、drive system and control system. In this paper, it has shortly introduced the position connection and work process between manipulator and other equipments. It has also given a relatively minute discussion of the manipulator overall plan, especially have compared the different projects to realize the require action and then given out the final scheme. According to the motion requirements of the manipulator’s arm, it has adopted cylindrical coordinate manipulator. The number of the manipulator’s freedom is four: up-down and rotating of the big arm, the straight reciprocating motion of the small arm, revolving movement of the wrist. The fingers of the manipulator have adopted the two-points sustain round structure. The power drive of manipulator is to be used is hydraulic system and control program for points for control type. This design is mainly consist of the design of large arm take-off and landing and rotating, the structural design of arm and telescopic arm, structural design of hand. What I mainly design is the structural design of large arm take-off and landing and rotation, and I carry out the theoretical analysis and comparison of hydraulic system.
Key words:Double-acting oil cylinder; Point-to-point control; Hydraulic system ; Structural design
一 绪论 - 4 -
1.1 机械手的基本概念 - 6 -
1.2 机械手的应用简况 - 6 -
1.3 机械手的发展趋势 - 6 -
1.4 应用机械手的意义 - 7 -
二 总体方案及分析 - 8 -
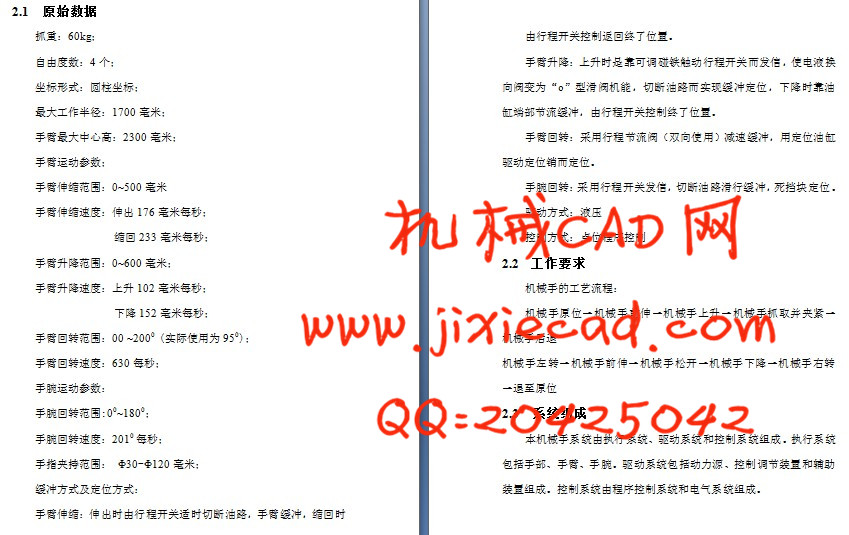
2.1 原始数据 - 8 -
2.2 工作要求 - 10 -
2.3 系统组成 - 10 -
2.4 总体技术方案及分析 - 11 -
2.5 液压系统的工作原理和优缺点 - 17 -
2.6 手部结构 - 19 -
三 自动上料机械手升降油缸的设计计算及选择 - 20 -
3.1 工作载荷的计算 - 20 -
3.2 液压缸的主要尺寸的确定 - 20 -
3.3 液压缸主要部件的设计和材料选择 - 22 -
3.4 校核 - 23 -
3.5 关于液压缸的缓冲与排气、密封 - 24 -
总 结 - 25 -
参 考 文 献 - 26 -
致 谢 - 27 -
工业机械手是一种在工业生产中代替人执行危险或者重复工作的自动化装置,按照设定的程序、轨迹和要求执行抓取、搬运工作或操持工具或进行操作。它主要有执行机构、驱动系统、和控制系统组成。本文简要介绍了机械手与其它设备的配置关系及工作过程,并对机械手的动作进行了分析,详细论述了机械手总体方案的设计,特别是对实现预期要求动作的各种方案进行了比较分析,进而得出最终方案。根据手臂的动作要求,采用圆柱坐标型机械手;机械手的自由度数为四个,它们是大臂的升降和回转运动,小臂的伸缩运动,手腕的回转运动;机械手手部结构采用两支点回转型;机械手驱动方式采用液压驱动。控制方式为点位程序控制。本次设计主要进行大臂升降及回转机构设计、手臂及伸缩结构设计、手部结构设计,重点进行大臂升降及回转设计并且对液压系统进行理论分析和比较。
关 键 词:双作用式油缸; 点位控制; 液压系统 ; 结构设计
Abstract
Industrial manipulator is a kind of automatic devices, which substitutes people to carry out dangerous or duplicate work. It complies crawler tracks、handling work or manage or operate a tool according to set procedures and requirements. It is constituted with executive body、drive system and control system. In this paper, it has shortly introduced the position connection and work process between manipulator and other equipments. It has also given a relatively minute discussion of the manipulator overall plan, especially have compared the different projects to realize the require action and then given out the final scheme. According to the motion requirements of the manipulator’s arm, it has adopted cylindrical coordinate manipulator. The number of the manipulator’s freedom is four: up-down and rotating of the big arm, the straight reciprocating motion of the small arm, revolving movement of the wrist. The fingers of the manipulator have adopted the two-points sustain round structure. The power drive of manipulator is to be used is hydraulic system and control program for points for control type. This design is mainly consist of the design of large arm take-off and landing and rotating, the structural design of arm and telescopic arm, structural design of hand. What I mainly design is the structural design of large arm take-off and landing and rotation, and I carry out the theoretical analysis and comparison of hydraulic system.
Key words:Double-acting oil cylinder; Point-to-point control; Hydraulic system ; Structural design
一 绪论 - 4 -
1.1 机械手的基本概念 - 6 -
1.2 机械手的应用简况 - 6 -
1.3 机械手的发展趋势 - 6 -
1.4 应用机械手的意义 - 7 -
二 总体方案及分析 - 8 -
2.1 原始数据 - 8 -
2.2 工作要求 - 10 -
2.3 系统组成 - 10 -
2.4 总体技术方案及分析 - 11 -
2.5 液压系统的工作原理和优缺点 - 17 -
2.6 手部结构 - 19 -
三 自动上料机械手升降油缸的设计计算及选择 - 20 -
3.1 工作载荷的计算 - 20 -
3.2 液压缸的主要尺寸的确定 - 20 -
3.3 液压缸主要部件的设计和材料选择 - 22 -
3.4 校核 - 23 -
3.5 关于液压缸的缓冲与排气、密封 - 24 -
总 结 - 25 -
参 考 文 献 - 26 -
致 谢 - 27 -