设计简介
小型物料运送手臂设计
目 录
1绪 论 2
1.1 机械手臂概念 2
1.2本课题研究的目的及意义 2
1.3 国内外机械臂的发展和研究 3
1.4 本课题的任务要求及其可行性 4
1.4.1本课题将要完成的主要任务如下: 4
1.4.2 可行性分析 4
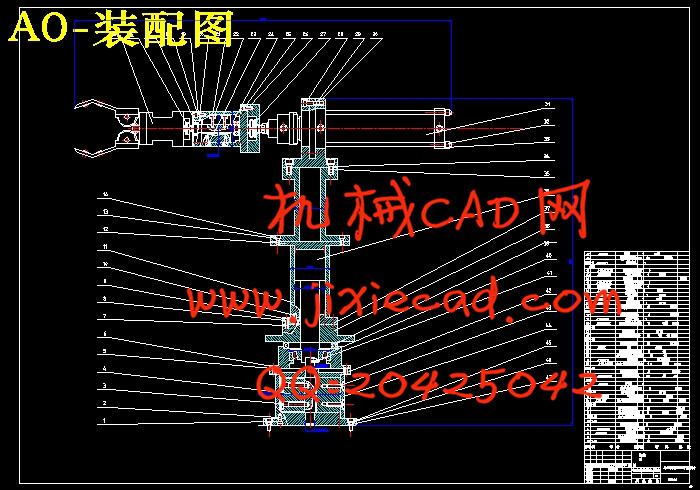
2 机械手臂的整体设计方案 4
2.1 机械手臂的组成 4
2.2 机械手臂的自由度 5
2.3 机械手臂的手部结构方案设计 5
2.4 机械手臂的手臂结构方案设计 5
2.5 机械手臂的驱动方案设计 5
2.6 机械手臂的控制方案设计 5
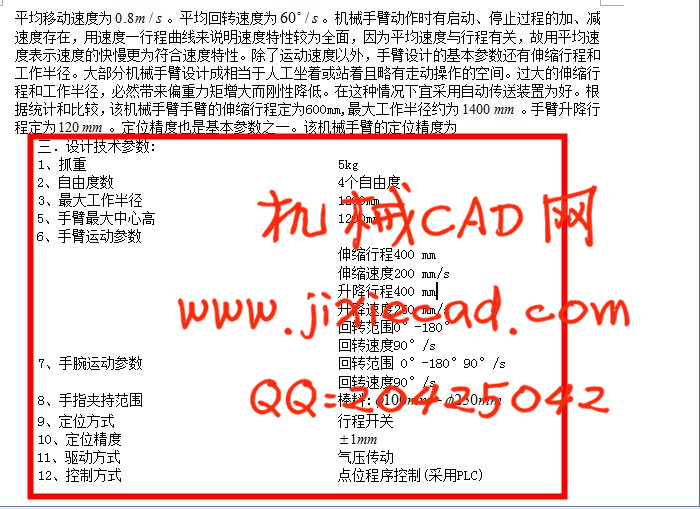
2.7 机械手臂的主要技术参数 6
2.8 机械手臂的系统工作原理 7
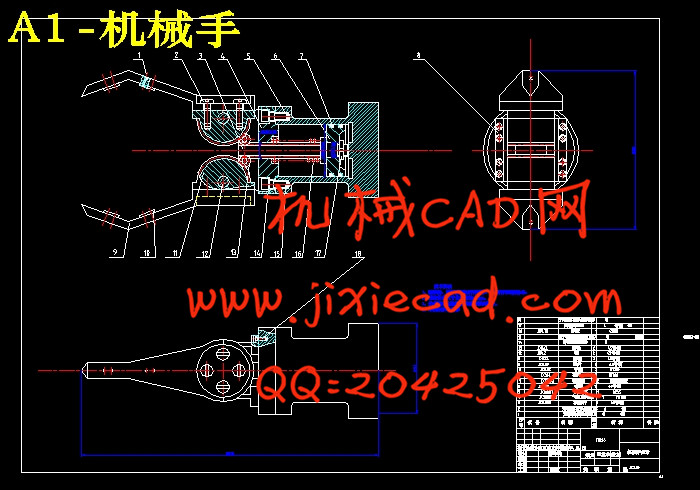
3 手部结构设计 8
3.1手指的形状和分类 9
3.2设计时考虑的几个问题 9
3.3手部夹紧气缸的设计 9
4 臂部结构设计 12
4.1 手腕的自由度 12
4.2 手腕的回转气缸设计与校核 12
4.3 臂部伸缩气缸的设计与校核 13
4.3.1 手臂伸缩气缸的尺寸设计 13
4.3.2 尺寸校核 13
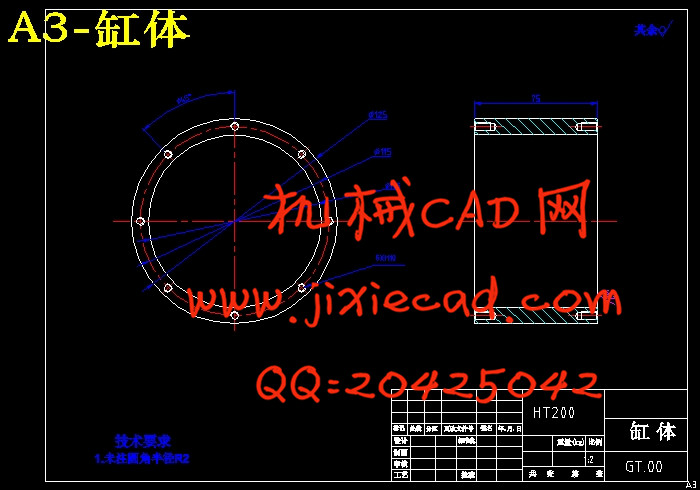
5 立柱的结构设计 14
5.1 臂部升降气缸的尺寸设计与校核 14
5.1.1 尺寸设计 14
5.1.2 尺寸校核 14
5.2 手臂回转气缸的尺寸设计与校核 15
5.2.1 尺寸设计 15
5.2.2 尺寸校核 15
6 机械手臂的PLC控制系统设计 16
6.1 可编程序控制器的选择及工作过程 16
6.1.1 可编程序控制器的选择 16
6.1.2 可编程序控制器的工作过程 16
6.2 可编程序控制器的使用步骤 17
6.3 机械手臂可编程序控制器控制方案 17
6.3.1 控制要求 17
6.3.2 机械手臂的工作流程 18
6.3.3 机械手臂的PLC梯形图 19
7 结论 19
致 谢 21
参考文献 22
目 录
1绪 论 2
1.1 机械手臂概念 2
1.2本课题研究的目的及意义 2
1.3 国内外机械臂的发展和研究 3
1.4 本课题的任务要求及其可行性 4
1.4.1本课题将要完成的主要任务如下: 4
1.4.2 可行性分析 4
2 机械手臂的整体设计方案 4
2.1 机械手臂的组成 4
2.2 机械手臂的自由度 5
2.3 机械手臂的手部结构方案设计 5
2.4 机械手臂的手臂结构方案设计 5
2.5 机械手臂的驱动方案设计 5
2.6 机械手臂的控制方案设计 5
2.7 机械手臂的主要技术参数 6
2.8 机械手臂的系统工作原理 7
3 手部结构设计 8
3.1手指的形状和分类 9
3.2设计时考虑的几个问题 9
3.3手部夹紧气缸的设计 9
4 臂部结构设计 12
4.1 手腕的自由度 12
4.2 手腕的回转气缸设计与校核 12
4.3 臂部伸缩气缸的设计与校核 13
4.3.1 手臂伸缩气缸的尺寸设计 13
4.3.2 尺寸校核 13
5 立柱的结构设计 14
5.1 臂部升降气缸的尺寸设计与校核 14
5.1.1 尺寸设计 14
5.1.2 尺寸校核 14
5.2 手臂回转气缸的尺寸设计与校核 15
5.2.1 尺寸设计 15
5.2.2 尺寸校核 15
6 机械手臂的PLC控制系统设计 16
6.1 可编程序控制器的选择及工作过程 16
6.1.1 可编程序控制器的选择 16
6.1.2 可编程序控制器的工作过程 16
6.2 可编程序控制器的使用步骤 17
6.3 机械手臂可编程序控制器控制方案 17
6.3.1 控制要求 17
6.3.2 机械手臂的工作流程 18
6.3.3 机械手臂的PLC梯形图 19
7 结论 19
致 谢 21
参考文献 22