设计简介
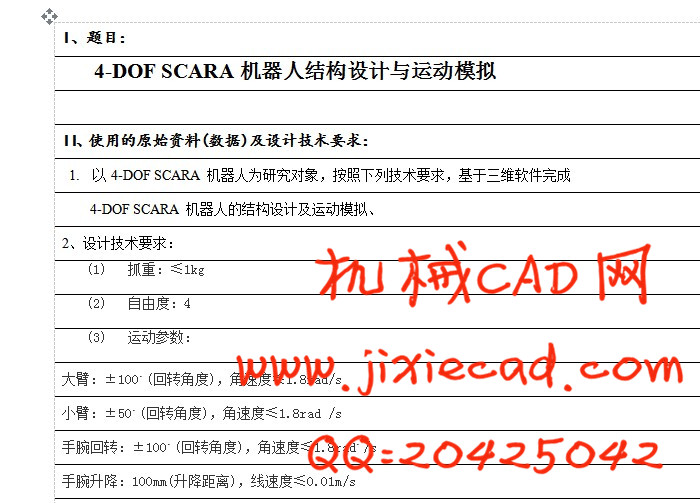
4-DOF SCARA 机器人结构设计与运动模拟
摘要:工业机器人是最典型的机电一体化数字化装备,技术附加值很高,应用范围很广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起着越来越重要的作用。
本文设计了一个工业用SCARA机器人。SCARA机器人(全称Selectively Compliance Articulated Robot Arm)很类似人的手臂的运动,它包含肩关节肘关节和腕关节来实现水平和垂直运动。它是一种工业机器人,具有四个自由度。其中,三个旋转自由度,另外一个是移动自由度。它能实现平面运动,具有柔顺性,全臂在垂直方向的刚度大,在水平方向的柔性大,广泛用于装配作业中。
本文用模块化设计方法设计了SCARA机器人的机械结构。分析了SCARA机器人的运动学正解和逆解,建立了机器人末端位姿误差计算模型并做了运动模拟。
关键字: SCARA 位姿误差
4-DOF SCARA robot design and motion simulation
Abstract :Industrial robot is the most typical mechatronic digital equipment, added value and high, wide range of applications, support for advanced manufacturing technology and information society, new industries, and social development of future production will increasingly play a The more important role.
This paper designs an industrial SCARA robot. SCARA robot (full name Selectively Compliance Articulated Robot Arm) is very similar to human arm movement, which includes the shoulder elbow and wrist joints to achieve horizontal and vertical movement. It is an industrial robot has four degrees of freedom. Among them, the three rotational degrees of freedom, the other is the DOF. It can achieve planar motion, with the flexibility, the whole arm in the vertical stiffness, flexibility in the horizontal direction of the large, widely used in assembly operations.
This method was designed with a modular design the mechanical structure of SCARA robot. Analysis of the SCARA robot inverse kinematics, and to establish the position and orientation of robot end of the model error.
Keywords: SCARA analysis
目录
第一章绪论 1
1.1引言 1
1.2 国内外机器人领域研究现状及发展趋势 1
1.3 SCARA机器人简介 2
1.4平面关节型装配机器人关键技术 4
1.4.1操作机的机构设计与传动技术 4
1.4.2机器人计算机控制技术 4
1.4.3检测传感技术 5
1.5项目的主要研究内容 6
1.5.1项目研究的主要内容、技术方案及其意义 6
1.5.2拟解决的关键问题 7
第二章SCAAR机器人的机械结构设计 7
2.1 SCARA机器人的总体设计 7
2.1.1 SCARA机器人的技术参数 7
2.1.2 SCARA机器人外形尺寸与工作空间 7
2.1.3 SCARA机器人的总体传动方案 8
2.2机器人关键零部件设计计算 10
2.2.1减速机的设计计算 10
2.2.2电机的设计计算 11
2.2.3同步齿型带的设计计算 11
2.2.4滚珠丝杠副的设计计算 13
2.3大臂和小臂机械结构设计 14
2.4腕部机械结构设计 16
2.5小结 17
第三章SCARA机器人的位姿误差建模 17
3.1基于机构精度通用算法的机器人位姿误差建模 17
3.2机构精度通用算法 18
3.2.2通用机器人位姿误差模型 20
3.2.2.1机构通用精度模型与机器人位姿误差模型的联系 20
3.2.2机器人位姿误差模型的建立 20
3.3 小结 25
总结 26
参考文献 27
致谢 28
摘要:工业机器人是最典型的机电一体化数字化装备,技术附加值很高,应用范围很广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起着越来越重要的作用。
本文设计了一个工业用SCARA机器人。SCARA机器人(全称Selectively Compliance Articulated Robot Arm)很类似人的手臂的运动,它包含肩关节肘关节和腕关节来实现水平和垂直运动。它是一种工业机器人,具有四个自由度。其中,三个旋转自由度,另外一个是移动自由度。它能实现平面运动,具有柔顺性,全臂在垂直方向的刚度大,在水平方向的柔性大,广泛用于装配作业中。
本文用模块化设计方法设计了SCARA机器人的机械结构。分析了SCARA机器人的运动学正解和逆解,建立了机器人末端位姿误差计算模型并做了运动模拟。
关键字: SCARA 位姿误差
4-DOF SCARA robot design and motion simulation
Abstract :Industrial robot is the most typical mechatronic digital equipment, added value and high, wide range of applications, support for advanced manufacturing technology and information society, new industries, and social development of future production will increasingly play a The more important role.
This paper designs an industrial SCARA robot. SCARA robot (full name Selectively Compliance Articulated Robot Arm) is very similar to human arm movement, which includes the shoulder elbow and wrist joints to achieve horizontal and vertical movement. It is an industrial robot has four degrees of freedom. Among them, the three rotational degrees of freedom, the other is the DOF. It can achieve planar motion, with the flexibility, the whole arm in the vertical stiffness, flexibility in the horizontal direction of the large, widely used in assembly operations.
This method was designed with a modular design the mechanical structure of SCARA robot. Analysis of the SCARA robot inverse kinematics, and to establish the position and orientation of robot end of the model error.
Keywords: SCARA analysis
目录
第一章绪论 1
1.1引言 1
1.2 国内外机器人领域研究现状及发展趋势 1
1.3 SCARA机器人简介 2
1.4平面关节型装配机器人关键技术 4
1.4.1操作机的机构设计与传动技术 4
1.4.2机器人计算机控制技术 4
1.4.3检测传感技术 5
1.5项目的主要研究内容 6
1.5.1项目研究的主要内容、技术方案及其意义 6
1.5.2拟解决的关键问题 7
第二章SCAAR机器人的机械结构设计 7
2.1 SCARA机器人的总体设计 7
2.1.1 SCARA机器人的技术参数 7
2.1.2 SCARA机器人外形尺寸与工作空间 7
2.1.3 SCARA机器人的总体传动方案 8
2.2机器人关键零部件设计计算 10
2.2.1减速机的设计计算 10
2.2.2电机的设计计算 11
2.2.3同步齿型带的设计计算 11
2.2.4滚珠丝杠副的设计计算 13
2.3大臂和小臂机械结构设计 14
2.4腕部机械结构设计 16
2.5小结 17
第三章SCARA机器人的位姿误差建模 17
3.1基于机构精度通用算法的机器人位姿误差建模 17
3.2机构精度通用算法 18
3.2.2通用机器人位姿误差模型 20
3.2.2.1机构通用精度模型与机器人位姿误差模型的联系 20
3.2.2机器人位姿误差模型的建立 20
3.3 小结 25
总结 26
参考文献 27
致谢 28