设计简介
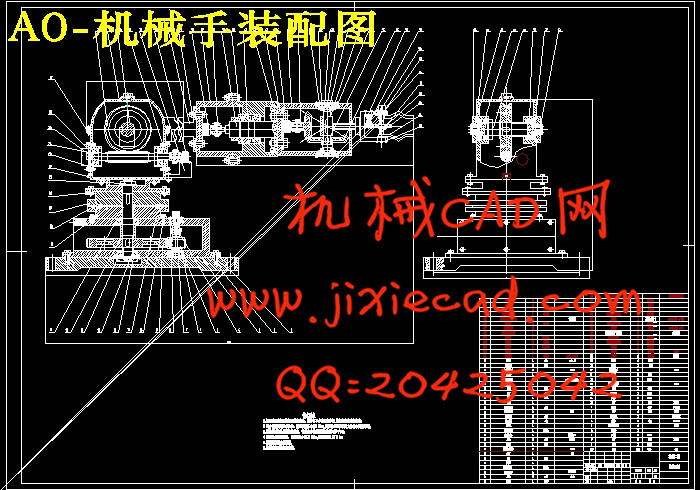
摘要:机械手设计包括机械结构设计,检测传感系统设计和控制系统设计等,是机械、电子、检测、控制和计算机技术的综合应用。本课题通过对设计要求的分析,设计出机械手的总体方案,重点阐述了手部结构的设计以及控制系统硬软件的设计,完成了整个系统工作的图纸设计。实现了机械手的基本搬运功能,达到了预期要求,具有一定的应用前景。
关键词:机械手 PLC 机械传动
Abstract:Design of manipulator mechanical structure design, sensor detection system design and control system design, is a comprehensive application of mechanical, electronic, detection, control and computer technology. This topic through the analysis of the design requirenments, design the overall scheme of the manipulator, focuses on the design of hand structure and the design of hardware and software of control system, completed the design drawings of the system work. The realization of the basic functions of the conveying manipulator, reached the expected requirements, and has a good application prospect.
Key words:Manipulator PLC Mechanical transmission
目 录
摘要……………………………………………………………………………1
关键词…………………………………………………………………………1
1前言……………………………………………………………………………1
2机械手的基本要求及相关计算……………………………………4
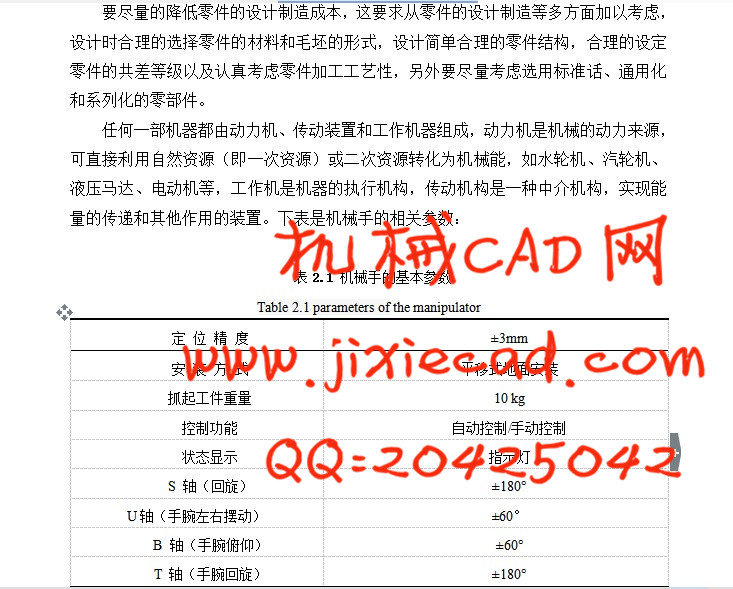
2.1对机器人整体的设计要求 ………………………………………………4
2.2零件的基本要求及参数…………………………………………………4
3 机械手原理分析、方案确定及材料选择 …………………………………5
3.1驱动方式…………………………………………………………………5
3.1.1液压驱动…………………………………………………………………5
3.1.2电机驱动…………………………………………………………………6
3.2传动方式……………………………………………………………………6
3.2.1带传动……………………………………………………………………6
3.2.2链传动……………………………………………………………………7
3.2.3齿轮传动…………………………………………………………………7
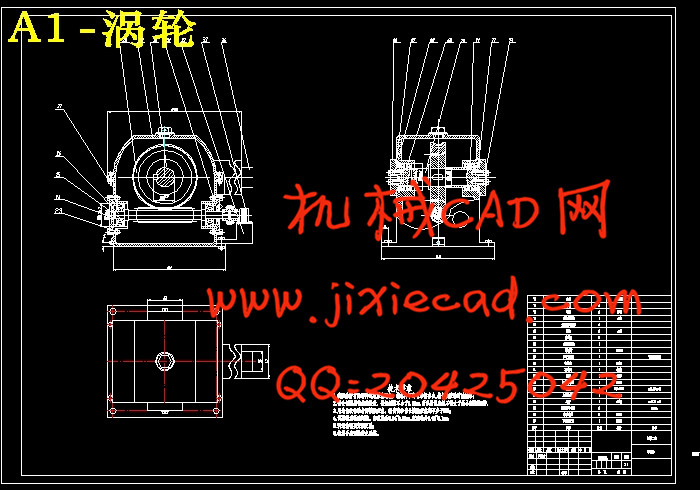
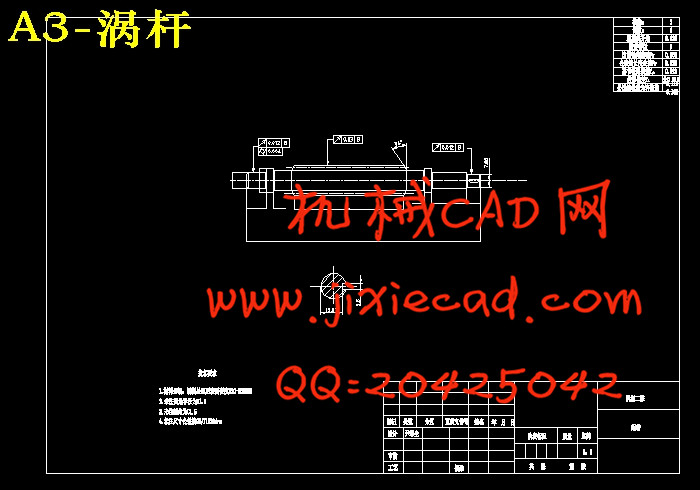
3.2.4蜗杆传动…………………………………………………………………7
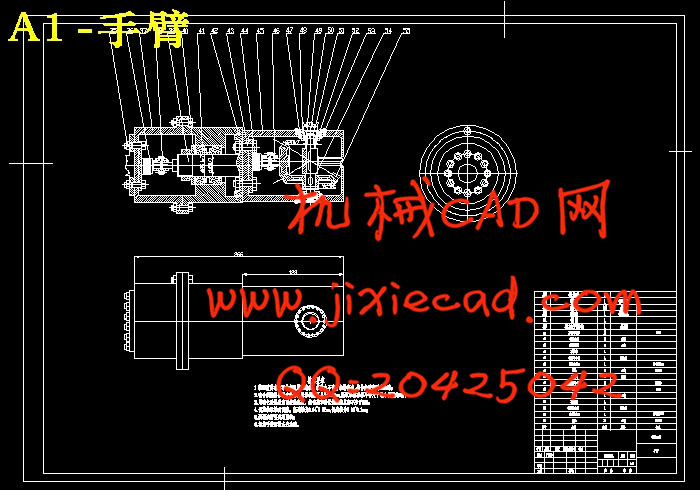
3.3机械手结构…………………………………………………………………8
3.4机械手材料………………………………………………………………10
3.4.1机械材料选用原则……………………………………………………10
3.4.2材料的工艺要求………………………………………………………10
3.4.3零件材料从材料选用原则的使用要求、加工要求和经济要 求………………………………………………………………11
4机械手的计算………………………………………………………………12
4.1机械手零件尺寸及强度计算及校核……………………………………12
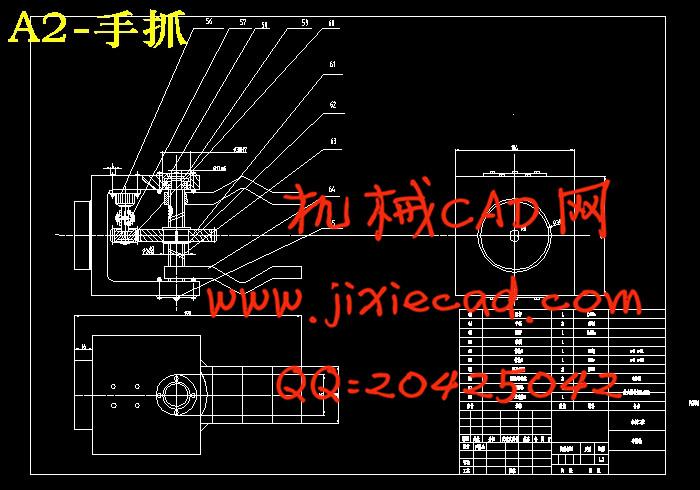
4.1.1机械手爪的受力分析…………………………………………………12
4.1.2丝杆的尺寸计算………………………………………………………13
4.2齿轮的选择及计算………………………………………………………13
4.2.1选定齿轮的类型、精度等级、材料及齿数……………………………13
4.2.2按齿面接触强度设计…………………………………………………14
4.2.3按齿根弯曲强度设计…………………………………………………16
4.2.4几何尺寸计算……………………………………………………17
5锥齿轮的几何尺寸设计计算………………………………………………17
5.1大端模数…………………………………………………………………17
5.2其他参数…………………………………………………………………18
6轴的设计……………………………………………………………………19
6.1初步估算中间轴的最小直径……………………………………………19
6.2求轴上的载荷……………………………………………………………20
6.3画弯矩图、转矩图…………………………………………………………21
6.4按第三强度理论进行强度校核…………………………………………22
6.5校核轴的疲劳强度………………………………………………………22
6.6轴的疲劳强度安全系数校核……………………………………………25
6.7轴的刚度校核……………………………………………………………26
6.8蜗轮蜗杆的计算及校核…………………………………………………27
7轴承选取与寿命计算………………………………………………………28
8 PLC概述………………………………………………………………………30
8.1PLC的定义…………………………………………………………………30
8.2PLC的由来及发展…………………………………………………………31
8.3PLC的特点及用途…………………………………………………………32
9控制系统的功能要求………………………………………………………34
9.1机械手的结构……………………………………………………………34
9.2硬件系统设计……………………………………………………………36
9.3 PLC的选型…………………………………………………………………37
9.3.1PLC的I/O资源配置……………………………………………………38
9.3.2其他资源设置…………………………………………………………39
9.3.3总体流程设计…………………………………………………………40
9.3.4各个模块梯形图设计…………………………………………………41
结论…………………………………………………………………………55
参考文献 ………………………………………………………………………55
致谢……………………………………………………………………………57
关键词:机械手 PLC 机械传动
Abstract:Design of manipulator mechanical structure design, sensor detection system design and control system design, is a comprehensive application of mechanical, electronic, detection, control and computer technology. This topic through the analysis of the design requirenments, design the overall scheme of the manipulator, focuses on the design of hand structure and the design of hardware and software of control system, completed the design drawings of the system work. The realization of the basic functions of the conveying manipulator, reached the expected requirements, and has a good application prospect.
Key words:Manipulator PLC Mechanical transmission
目 录
摘要……………………………………………………………………………1
关键词…………………………………………………………………………1
1前言……………………………………………………………………………1
2机械手的基本要求及相关计算……………………………………4
2.1对机器人整体的设计要求 ………………………………………………4
2.2零件的基本要求及参数…………………………………………………4
3 机械手原理分析、方案确定及材料选择 …………………………………5
3.1驱动方式…………………………………………………………………5
3.1.1液压驱动…………………………………………………………………5
3.1.2电机驱动…………………………………………………………………6
3.2传动方式……………………………………………………………………6
3.2.1带传动……………………………………………………………………6
3.2.2链传动……………………………………………………………………7
3.2.3齿轮传动…………………………………………………………………7
3.2.4蜗杆传动…………………………………………………………………7
3.3机械手结构…………………………………………………………………8
3.4机械手材料………………………………………………………………10
3.4.1机械材料选用原则……………………………………………………10
3.4.2材料的工艺要求………………………………………………………10
3.4.3零件材料从材料选用原则的使用要求、加工要求和经济要 求………………………………………………………………11
4机械手的计算………………………………………………………………12
4.1机械手零件尺寸及强度计算及校核……………………………………12
4.1.1机械手爪的受力分析…………………………………………………12
4.1.2丝杆的尺寸计算………………………………………………………13
4.2齿轮的选择及计算………………………………………………………13
4.2.1选定齿轮的类型、精度等级、材料及齿数……………………………13
4.2.2按齿面接触强度设计…………………………………………………14
4.2.3按齿根弯曲强度设计…………………………………………………16
4.2.4几何尺寸计算……………………………………………………17
5锥齿轮的几何尺寸设计计算………………………………………………17
5.1大端模数…………………………………………………………………17
5.2其他参数…………………………………………………………………18
6轴的设计……………………………………………………………………19
6.1初步估算中间轴的最小直径……………………………………………19
6.2求轴上的载荷……………………………………………………………20
6.3画弯矩图、转矩图…………………………………………………………21
6.4按第三强度理论进行强度校核…………………………………………22
6.5校核轴的疲劳强度………………………………………………………22
6.6轴的疲劳强度安全系数校核……………………………………………25
6.7轴的刚度校核……………………………………………………………26
6.8蜗轮蜗杆的计算及校核…………………………………………………27
7轴承选取与寿命计算………………………………………………………28
8 PLC概述………………………………………………………………………30
8.1PLC的定义…………………………………………………………………30
8.2PLC的由来及发展…………………………………………………………31
8.3PLC的特点及用途…………………………………………………………32
9控制系统的功能要求………………………………………………………34
9.1机械手的结构……………………………………………………………34
9.2硬件系统设计……………………………………………………………36
9.3 PLC的选型…………………………………………………………………37
9.3.1PLC的I/O资源配置……………………………………………………38
9.3.2其他资源设置…………………………………………………………39
9.3.3总体流程设计…………………………………………………………40
9.3.4各个模块梯形图设计…………………………………………………41
结论…………………………………………………………………………55
参考文献 ………………………………………………………………………55
致谢……………………………………………………………………………57