设计简介
摘 要
近代的工业机械手是由目标机械本体、控制器系统、传感装置系统、控制系统和伺服动力器系统组成,是一种模仿人的操作、自动化控制、可多次编程、能在立体空间完成各式各样作业的Mechatronics设备。工业机械手对于提高和确保产品质量,提升生产的效率,改善工人的工作条件和快速更新产品起着非常重要的作用。工业机械手技术结合了多们学科的知识。包含机构学、计算机、控制论、信息和传感技术、人工智能、仿生学等。它是当代十分活跃,应用非常广泛的领域。机械手具有很多人类所不具有的能力,包括快速分析环境能力;抗干扰能力强,能长时间工作和工作精度高。可以说机械手是工业进步的产物,它也发挥了在当今工业的至关重要的作用。如今,机械手工业已成为世界各国备受关注的产业。
本课题来源于亚龙YL-221型自动化柔性生产系统项目,该机械加工自主创新实训系统模拟了实际工业生产系统,根据生产机械加工的不同阶段设置了多个工作站:自动存取型高架仓库、搬运机械手站、直线输送机站、90度转弯输送机站、综合机械加工站、装配站、工件码堆站。
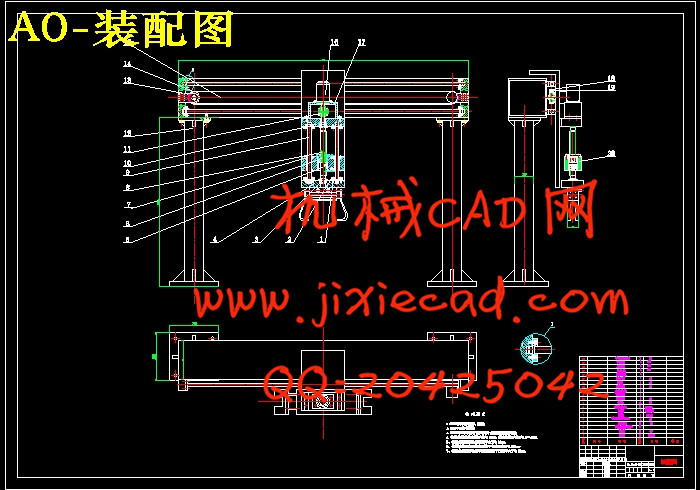
课题将设计一个龙门机械手,将用于工作人员出入,使断开输送带上的零件通过机械手进行运输,需完成对工件的安全抓紧和释放,并将零件从输送带的一端送到指定位置的另一端生产线输送带上。
本文阐述了机械手的发展历史,国内外的应用状况,及其巨大的优越性,提出了具体的机械手设计要求和进行了总体方案设计和各自由度的具体结构设计、计算。
关键词:机械手;工业;传动;强度
Abstract
Industrial manipulator is composed of target of modern mechanical body, control system, sensor system, control system and servo actuator system, operation, automatic control, a kind of imitation of human multiple programming, to complete the work of every kind of Mechatronics device in three-dimensional space. Industrial machinery hand to enhance and ensure the quality of products, improve production efficiency, plays a very important role in improving the working conditions of workers and the rapid updating of product. Industrial machinery hand technique combined with multi discipline knowledge. Including mechanism, computer, control theory, information and sensor technology, artificial intelligence, bionics and so on. It is the very active, very wide application areas.The manipulator has many human beings do not have, including the rapid analysis of environmental capacity; strong anti-interference ability, can work for a long time and high precision work. Can be said that the manipulator is a product of the progress of industry, it also plays a vital role in the modern industry. Nowadays, industrial robot has become the concern of the industry all over the world.
This subject comes from the Yalong YL-221 automation to flexible production system, the machine independent innovation training system to simulate the actual industrial production system, according to the different stages of production machine is provided with a plurality of workstation: automatic access overhead warehouse, handling robot station, line conveyor, conveyor station station 90 degree turn, mechanical processing station, station, the station code heap.
We design a robot will be used in Longmen, staff entry, disconnected to the conveyor belt parts are transported by mechanical hand, to the completion of the work of safety grip and release, and the parts from one end to the other end of the conveyor belt production line position specified on the conveyor belt.
This paper expounds the development history of the manipulator, the application status at home and abroad, and its great superiority, puts forward the design requirements of the manipulator specific and detail structure design, overall design and various degrees of freedom.
Key Words: robot; industrial; transmission; strength
目 录
Abstract III
目 录 IV
第1章 绪论 1
1.1 机械手概念 1
1.2 课题研究的背景和意义 1
1.3 国内机械手的研究 1
1.4机械手的应用 2
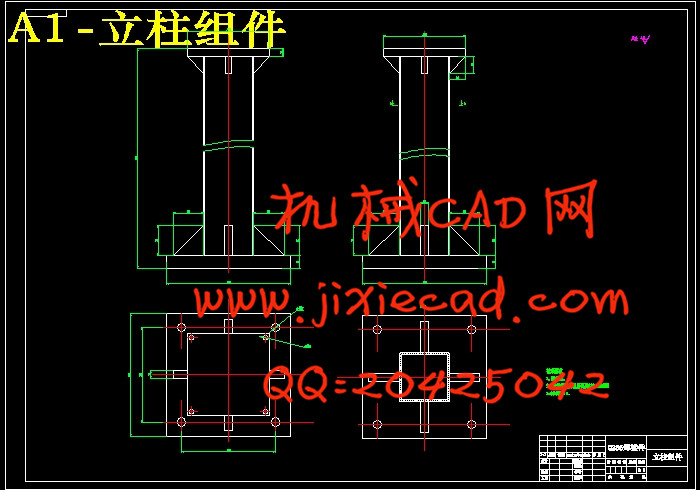
第2章 总体方案机构设计 3
2.1课题的技术要求 3
2.2设计原理 3
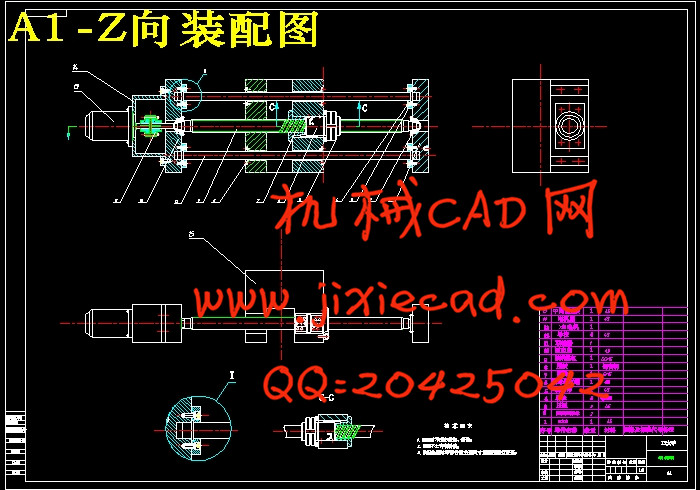
第3章 Z向结构及传动设计 5
3.1滚珠丝杆副的选择 6
3.1.1导程确定 6
3.1.2确定丝杆的等效转速 6
3.1.4确定丝杆的等效负载 6
3.1.5确定丝杆所受的最大动载荷 7
3.1.6精度的选择 8
3.1.7选择滚珠丝杆型号 8
3.2校核 8
3.2.1 临界压缩负荷验证 8
3.2.2临界转速验证 9
3.2.3丝杆拉压振动与扭转振动的固有频率 10
3.3电机的选择 11
3.3.1电机轴的转动惯量 11
3.3.2电机扭矩计算 12
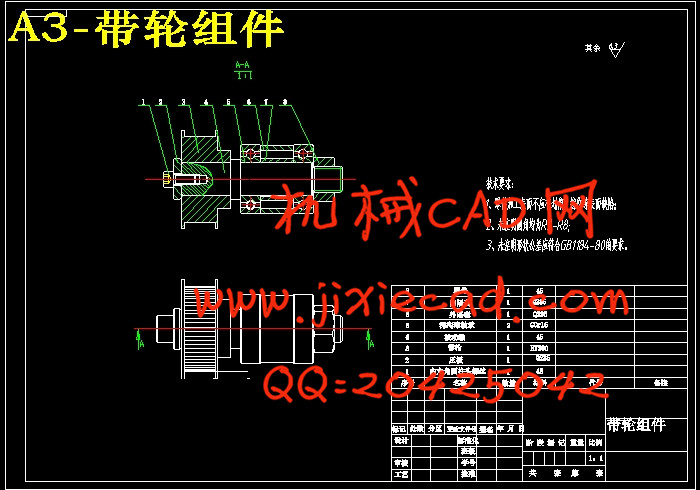
第4章 X轴水平移动传动设计 14
4.1 同步带计算选型 15
4.2 同步带的主要参数(结构部分) 18
4.3 同步带的设计 20
4.4 同步带轮的设计 21
4.5 轴的校核 21
4.6 键的校核 22
4.7 轴承的校核 23
第5章 手指的相关设计与计算 25
5.1 手指的相关设计与计算 25
5.2 手爪结构设计与校核 26
5.3 结构分析 27
5.4计算分析 28
5.5 机械手手抓夹持精度的分析计算 29
总 结 31
参考文献 32
致 谢 33