设计简介
目录
第1章. 绪论 3
1.1 智能机器人技术发展的重要意义 3
1.2 国内外机器人的发展史 3
1.2.1 国外机器人的发展历史 3
1.2.2 国内机器人的发展历史 4
1.3 服务机器人的特点关键技术 4
1.4 本论文的主要研究内容 5
1.5 本章小结 5
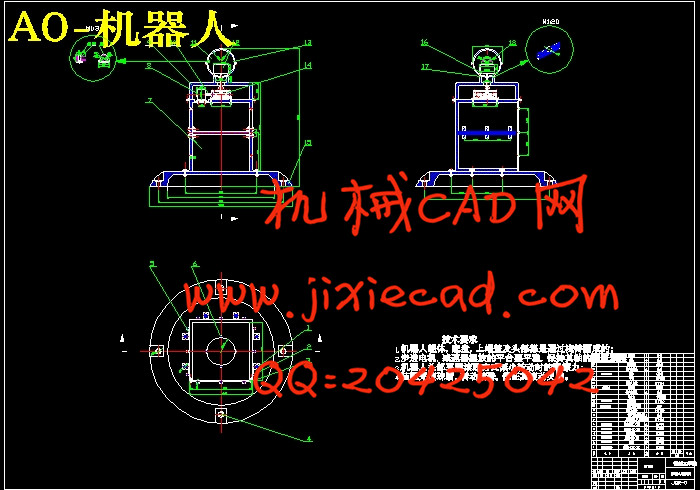
第2章.物体检测与报警机器人的总体设计 6
2.1 概述 6
2.2 主要组成 6
2.2.1 头部旋转机构 6
2.2.2 主体部 7
2.2.3 电机 7
2.3 主要技术参数 8
2.4. 电机的选型 8
2.4.1 驱动机构的组成. 8
2.4.2 步进电机的选型比较 9
2.4.3 步进电机的选型计算 10
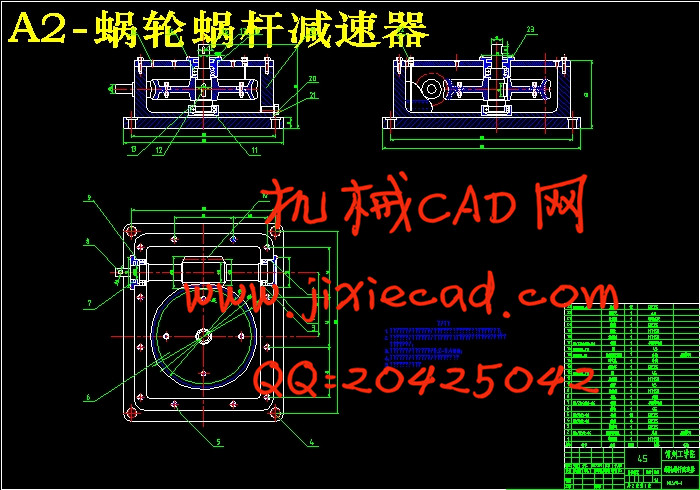
2.5 蜗轮蜗杆传动的选型设计 12
2.6 电机的效核 15
2.7 轴的较核及联件的选型 16
2.7.1. 蜗杆轴的较核. 16
2.7.2. 蜗杆轴上轴承的选型 20
2.7.3. 蜗轮轴的较核. 22
2.7.4. 蜗轮轴上轴承的选型 26
2.7.5. 键的较核 28
2.7.6. 联轴器的选型 28
2.8 本章小结 28
第3章. 驱动机构及其控制方式 29
3.1. 概述 29
3.2 步进电机及其控制系统 29
3.2.1 步进电机的工作特性. 29
3.2.2 步进电机的开环控制系统 31
3.3 本章小结 32
结束语 32
致 谢 33
参考文献 34
第1章. 绪论 3
1.1 智能机器人技术发展的重要意义 3
1.2 国内外机器人的发展史 3
1.2.1 国外机器人的发展历史 3
1.2.2 国内机器人的发展历史 4
1.3 服务机器人的特点关键技术 4
1.4 本论文的主要研究内容 5
1.5 本章小结 5
第2章.物体检测与报警机器人的总体设计 6
2.1 概述 6
2.2 主要组成 6
2.2.1 头部旋转机构 6
2.2.2 主体部 7
2.2.3 电机 7
2.3 主要技术参数 8
2.4. 电机的选型 8
2.4.1 驱动机构的组成. 8
2.4.2 步进电机的选型比较 9
2.4.3 步进电机的选型计算 10
2.5 蜗轮蜗杆传动的选型设计 12
2.6 电机的效核 15
2.7 轴的较核及联件的选型 16
2.7.1. 蜗杆轴的较核. 16
2.7.2. 蜗杆轴上轴承的选型 20
2.7.3. 蜗轮轴的较核. 22
2.7.4. 蜗轮轴上轴承的选型 26
2.7.5. 键的较核 28
2.7.6. 联轴器的选型 28
2.8 本章小结 28
第3章. 驱动机构及其控制方式 29
3.1. 概述 29
3.2 步进电机及其控制系统 29
3.2.1 步进电机的工作特性. 29
3.2.2 步进电机的开环控制系统 31
3.3 本章小结 32
结束语 32
致 谢 33
参考文献 34