设计简介
目 录
1 前言……………………………………………………………………………1
1.1工业机器人的含义…………………………………………………………1
2国内外发展状况及现状的介绍………………………………………………2
2.1 研究现状……………………………………………………………………2
第三章 手部结构设计…………………………………………………………5
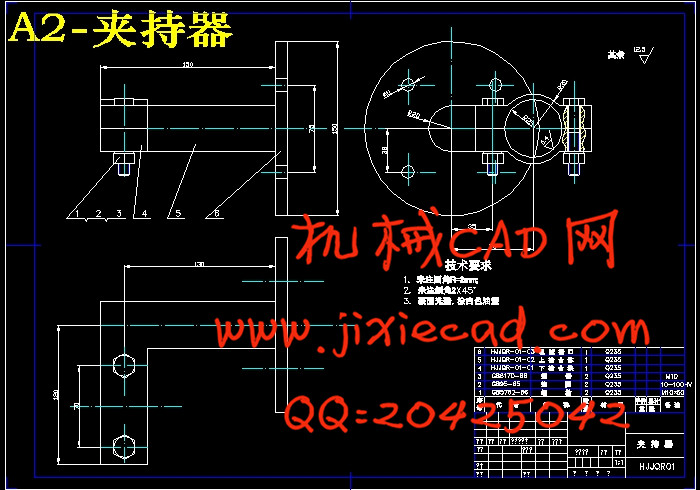
3.1夹持式手部结构……………………………………………………………8
3.1.1手指的形状和分类………………………………………………………8
3.1.2设计时考虑的几个问题…………………………………………………9
3.1.3手部夹紧气缸的设计……………………………………………………9
第四章 手腕结构设计…………………………………………………………10
4.1手腕的自由度………………………………………………………………11
4.2手腕的驱动力矩的计算……………………………………………………11
4.2.1手腕转动时所需的驱动力矩……………………………………………12
4.2.2回转气缸的驱动力矩计算………………………………………………13
4.2.3回转气缸的驱动力矩计算校核…………………………………………13
第五章 工业机器人零件选择及其强度的计算………………………………14
5.1 机架…………………………………………………………………………14
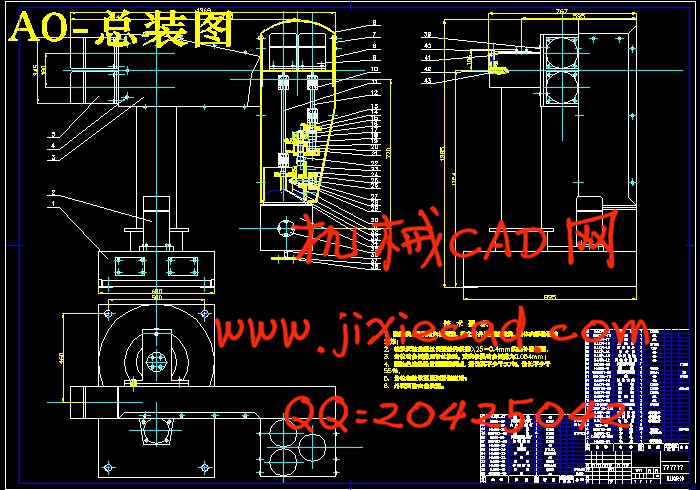
5.2 工业机器人…………………………………………………………………16
5.3 连杆十字头连接处销子强度的计算………………………………………17
5.4 柱塞上螺纹强度计算………………………………………………………17
5.5工业机器人壁厚强度计算和选择…………………………………………19
5.6 工业机器人强度计算和选择………………………………………………21
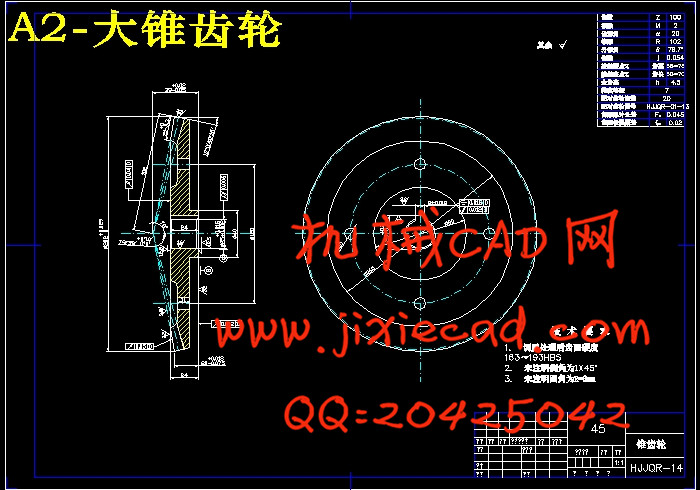
5.7 减速器的选择和计算………………………………………………………21
5.8 V带传动的计算……………………………………………………………22
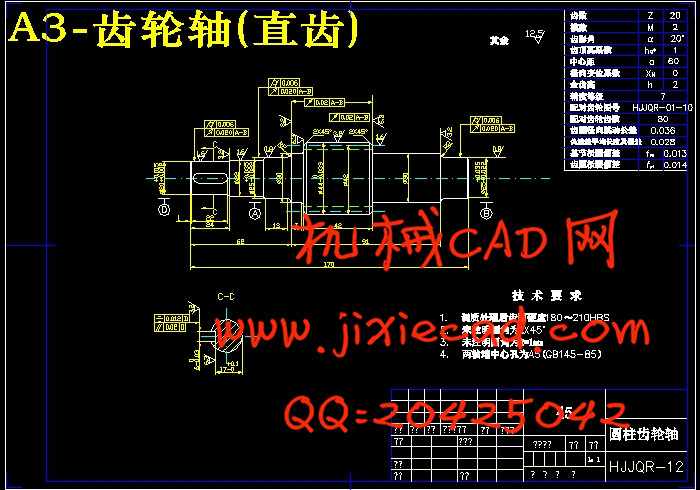
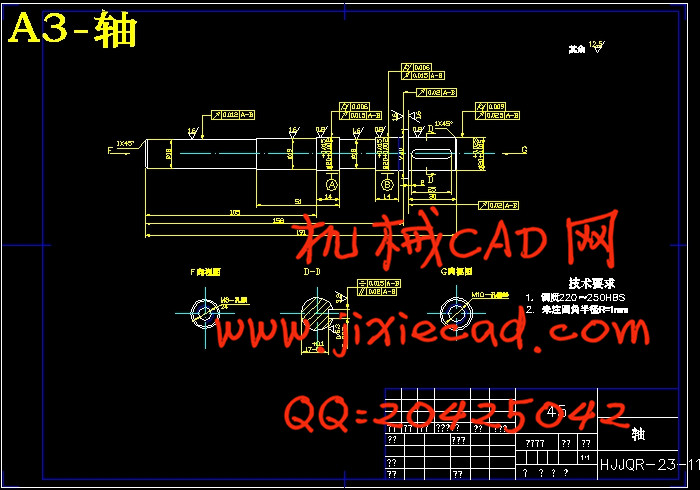
5.9 轴的设计和强度校核………………………………………………………22
5.10轴承选择……………………………………………………………………22
5.11 轴上键的选择………………………………………………………………23
5.12活塞密封圈的选择…………………………………………………………25
5.13. 工业机器人的润滑………………………………………………………28
第六章 工业机器人的使用和维护……………………………………………29
6.1用途…………………………………………………………………………31
6.2结构…………………………………………………………………………32
6.3安装…………………………………………………………………………33
6.4 维护与保养…………………………………………………………………34
结论………………………………………………………………………………35
参考文献…………………………………………………………………………36
1 前言……………………………………………………………………………1
1.1工业机器人的含义…………………………………………………………1
2国内外发展状况及现状的介绍………………………………………………2
2.1 研究现状……………………………………………………………………2
第三章 手部结构设计…………………………………………………………5
3.1夹持式手部结构……………………………………………………………8
3.1.1手指的形状和分类………………………………………………………8
3.1.2设计时考虑的几个问题…………………………………………………9
3.1.3手部夹紧气缸的设计……………………………………………………9
第四章 手腕结构设计…………………………………………………………10
4.1手腕的自由度………………………………………………………………11
4.2手腕的驱动力矩的计算……………………………………………………11
4.2.1手腕转动时所需的驱动力矩……………………………………………12
4.2.2回转气缸的驱动力矩计算………………………………………………13
4.2.3回转气缸的驱动力矩计算校核…………………………………………13
第五章 工业机器人零件选择及其强度的计算………………………………14
5.1 机架…………………………………………………………………………14
5.2 工业机器人…………………………………………………………………16
5.3 连杆十字头连接处销子强度的计算………………………………………17
5.4 柱塞上螺纹强度计算………………………………………………………17
5.5工业机器人壁厚强度计算和选择…………………………………………19
5.6 工业机器人强度计算和选择………………………………………………21
5.7 减速器的选择和计算………………………………………………………21
5.8 V带传动的计算……………………………………………………………22
5.9 轴的设计和强度校核………………………………………………………22
5.10轴承选择……………………………………………………………………22
5.11 轴上键的选择………………………………………………………………23
5.12活塞密封圈的选择…………………………………………………………25
5.13. 工业机器人的润滑………………………………………………………28
第六章 工业机器人的使用和维护……………………………………………29
6.1用途…………………………………………………………………………31
6.2结构…………………………………………………………………………32
6.3安装…………………………………………………………………………33
6.4 维护与保养…………………………………………………………………34
结论………………………………………………………………………………35
参考文献…………………………………………………………………………36