设计简介
摘 要
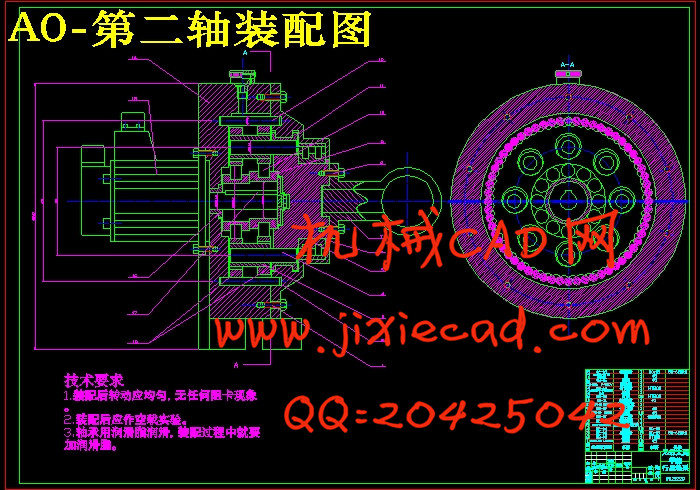
工业机器人专用减速器作为重要的机械传动部件具有体积小、重量轻、传动效率高等特点。本设计全面考虑到运转平稳、多齿啮合、轮齿均载等运动学和动力学的要求,从而实现承载能力高、传递效率高、可靠性高和动力学性能优良等指标,并且要便于制造、装配和检修,设计了具有合理结构的工业机器人专用减速器即摆线针轮行星减速器。
本论文所涉及的科研项目主要通过对摆线针轮行星减速器的主要零件的概念进行详细阐述,给出了摆线针轮减速器的用途,使用说明以及注意事项。列出了摆线针轮行星减速机的构造即输出部分,输入部分。通过对针摆行星传动减速器传动工作原理和特点进行分析,对针轮输出机构及针摆行星传动这种传动方式进行分析,以获得其理论设计和方法。从摆线针轮行星传动的共同点出发以及针摆轮行星减速器相对于少齿差行星减速器的优点提出针摆行星传动形式的设计计算方法。
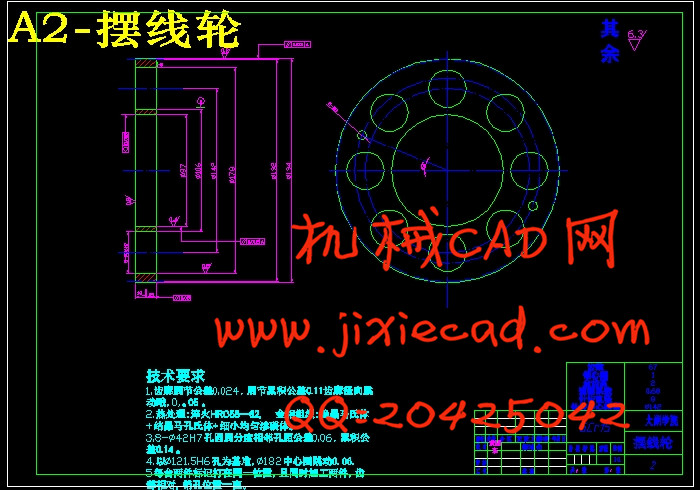
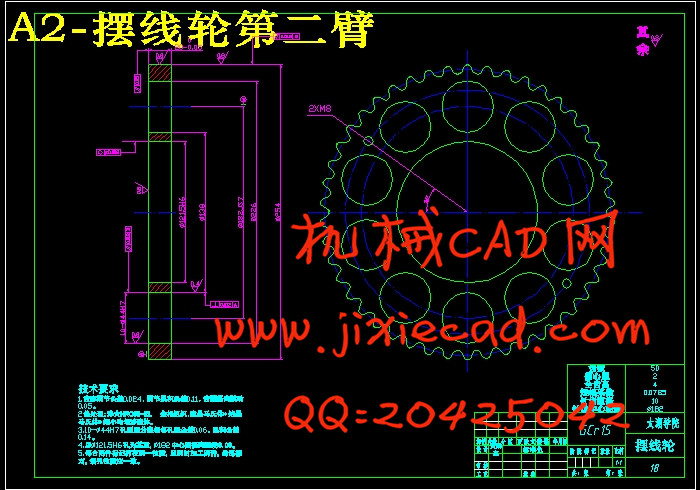
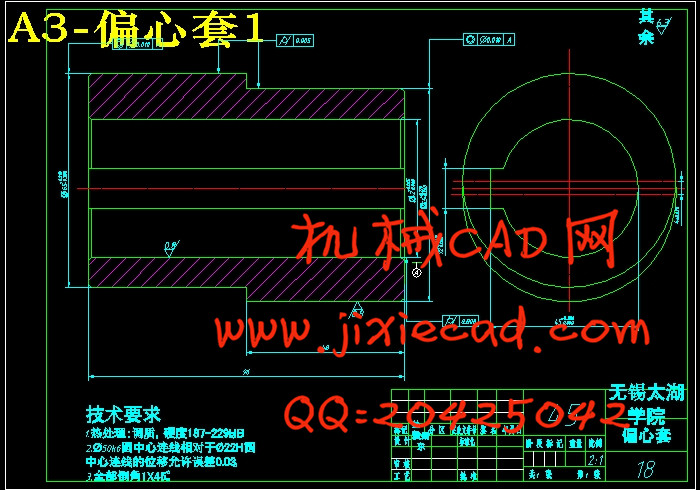
本论文主要从以下方面出发对摆线针轮行星传动进行了研究:参照传统针摆行星传动基本设计计算方法以及对摆线针轮行星传动主要零部件的基本参数设计计算,并对摆线轮、柱销,针轮进行受力分析最终计算出转臂轴承和各支撑轴承所能承受的载荷大小,完成包括摆线轮、柱销等主要零件强度校核计算和轴承的寿命计算,给出主要零件机械加工的工艺过程,然后利用CAD画出了主要零件的草图和最后的装配图。
关键词:摆线传动 ; 摆线轮 ; 受力分析
Abstract
The cycloid—gear reducer is one of the most important transmission components of the pumping unit by its smaller volume,lighter weight and effective transmission. In order to realize four targets which include high transmission efficiency, high reliability and the excellent dynamics performance and guarantee credible lubricate ability, receive high efficiency of transmission, and make it easy for manufacture, assembly and inspection, we thought over all the requests in the round and design the rational structure cycloid—gear reducer.
By analyzing characteristics and working principle of cycloid drive, and the output pin wheel cycloid drive’s working principle, we obtion the design theory and method of this new kind of reduce. This paper mainly complete works include that provide the design method and complete the prototype design and dynamics analysis of virtual prototype.
This paper researches the following aspects of the output pin wheel cycloid drive. First, the basic parameters and dimensions of main parts of the output pin wheel cycloid drive are designed referring to design and calculation methods of the traditional cycloid drive, and mechanical analysis of the transmission system and the load condition and life of rotary arm bearings and steady bearings of each shafts are calculated, and at the same time the calculations including the strength of cycloid wheel, pins and other major parts are completes. Then, using CAD to draw sketches of the main components and final assembly drawing.
Keywords:Planet—cycloid Reducer; Cycloid ;force analysis
By analyzing characteristics and working principle of cycloid drive, and the output pin wheel cycloid drive’s working principle, we obtion the design theory and method of this new kind of reduce. This paper mainly complete works include that provide the design method and complete the prototype design and dynamics analysis of virtual prototype.
This paper researches the following aspects of the output pin wheel cycloid drive. First, the basic parameters and dimensions of main parts of the output pin wheel cycloid drive are designed referring to design and calculation methods of the traditional cycloid drive, and mechanical analysis of the transmission system and the load condition and life of rotary arm bearings and steady bearings of each shafts are calculated, and at the same time the calculations including the strength of cycloid wheel, pins and other major parts are completes. Then, using CAD to draw sketches of the main components and final assembly drawing.
Keywords:Planet—cycloid Reducer; Cycloid ;force analysis
目 录
摘 要 III
Abstract IV
目 录 V
1 绪论 1
1.1 课题研究的背景和依据 1
1.2 本课题的研究意义 1
1.3 课题国内外研究现状及发展趋势 1
2 摆线针轮行星传动的简介 4
2.1摆线针轮的概念 4
2.2 摆线针轮减速机的用途,使用说明和注意事项 4
2.2.1 用途 4
2.2.2 使用条件 4
2.2.3 润滑 4
2.2.4 安装 5
2.3 摆线针轮行星减速器的构造 5
2.4 齿廓曲线的形成及其啮合原理 6
2.5 摆线针轮行星传动的特点及应用 8
3工业机器人的总体设计 9
3.1工业机器人的组成 9
3.1.1 工业机器人的系统组成 9
3.1.2 工业机器人的基本机能组成 9
3.2 机器人的结构分析 9
3.2.1 机器人的总体结构的概念 9
3.2.2机器人的传动结构 10
3.3机器人的设计分析及总体方案的确定 11
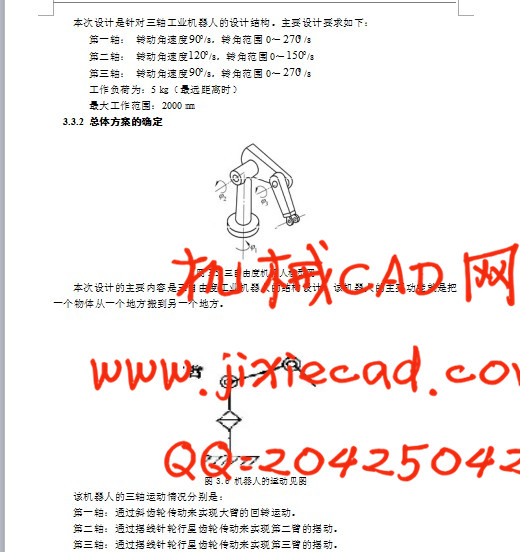
3.3.1 设计的任务要求 11
3.3.2总体方案的确定 12
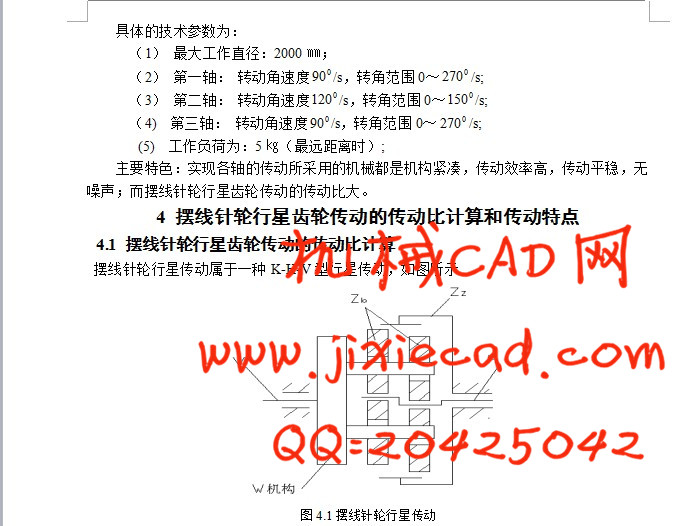
3.3.3 工业机器人的主要技术参数 12
4 摆线针轮行星齿轮传动的传动比计算和传动特点 12
4.1摆线针轮行星齿轮传动的传动比计算 13
4.2啮合的齿廓形成原理 14
5 摆线针轮行星齿轮传动设计 15
5.1针轮行星轮系的材料 15
5.2 第一套摆线针轮加速器的设计 15
5.2.1 选择结构形式,齿数及材料 15
摘 要 III
Abstract IV
目 录 V
1 绪论 1
1.1 课题研究的背景和依据 1
1.2 本课题的研究意义 1
1.3 课题国内外研究现状及发展趋势 1
2 摆线针轮行星传动的简介 4
2.1摆线针轮的概念 4
2.2 摆线针轮减速机的用途,使用说明和注意事项 4
2.2.1 用途 4
2.2.2 使用条件 4
2.2.3 润滑 4
2.2.4 安装 5
2.3 摆线针轮行星减速器的构造 5
2.4 齿廓曲线的形成及其啮合原理 6
2.5 摆线针轮行星传动的特点及应用 8
3工业机器人的总体设计 9
3.1工业机器人的组成 9
3.1.1 工业机器人的系统组成 9
3.1.2 工业机器人的基本机能组成 9
3.2 机器人的结构分析 9
3.2.1 机器人的总体结构的概念 9
3.2.2机器人的传动结构 10
3.3机器人的设计分析及总体方案的确定 11
3.3.1 设计的任务要求 11
3.3.2总体方案的确定 12
3.3.3 工业机器人的主要技术参数 12
4 摆线针轮行星齿轮传动的传动比计算和传动特点 12
4.1摆线针轮行星齿轮传动的传动比计算 13
4.2啮合的齿廓形成原理 14
5 摆线针轮行星齿轮传动设计 15
5.1针轮行星轮系的材料 15
5.2 第一套摆线针轮加速器的设计 15
5.2.1 选择结构形式,齿数及材料 15
5.2.2 强度计算针齿中心圆半径 15
5.2.3计算摆线轮和针轮的几何尺寸 16
5.2.4 转臂轴承的选择计算 17
5.2.5 针齿销弯曲强度计算 18
5.2.6 W输出机构销轴弯曲强度计算 19
5.3 第二套摆线针轮减速器的设计 20
5.3.1 选择结构形式,齿数及材料 20
5.3.2 接触强度计算针齿中心圆半径 20
5.3.3 计算摆线轮和针轮的几何尺寸 20
5.3.4 转臂轴承的选择计算 21
5.3.5 针齿销弯曲强度计算 22
5.3.6 W输出机构销轴弯曲强度计算 22
6行星齿轮传动输出轴的轴承选择 24
7 主要零件的机械加工工艺规程 25
7.1 摆线轮的加工工艺路线 25
7.2 针齿壳的加工工艺路线 26
7.3 输出轴加工工艺 26
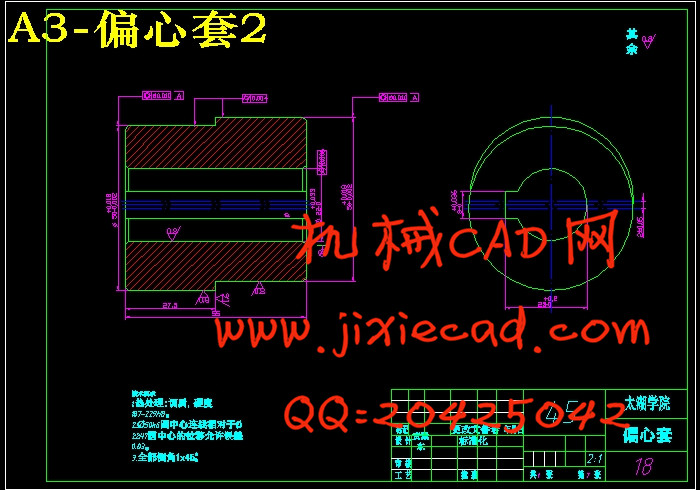
7.4 偏心套加工工艺 27
8结论与展望 29
8.1 结论29
8.2 展望29
致谢 .30
参考文献 31