设计简介
工业机械手设计及运动结构分析
题目背景和意义: 机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。在工业生产中应用的机械手被称为“工业机械手”。生产中应用机械手可以提高生产的自动化水平和劳动生产率:可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。,通过该设计旨在锻炼学生运用现代设计方法基本原理进行设计和工程分析,使学生受到机械工程师基本训练。
题目内容主要包括三个方面,专用机械手设计,建模和工程分析:
A. 在设计方面要求依据设计参数,设计生产线专用机械手的方案,结构。
B.在建模方面要求建立专用机械手等的实体装配模型。对实体装配模型进行工程简化。
C. 在工程分析方面要求合理确定约束条件,分析机械手手指在生产中的变形量并对强度进行校核。
D. 运动分析方面要求提取六自由度机械手手指的速度,加速度,特性。并输出运动规律曲线
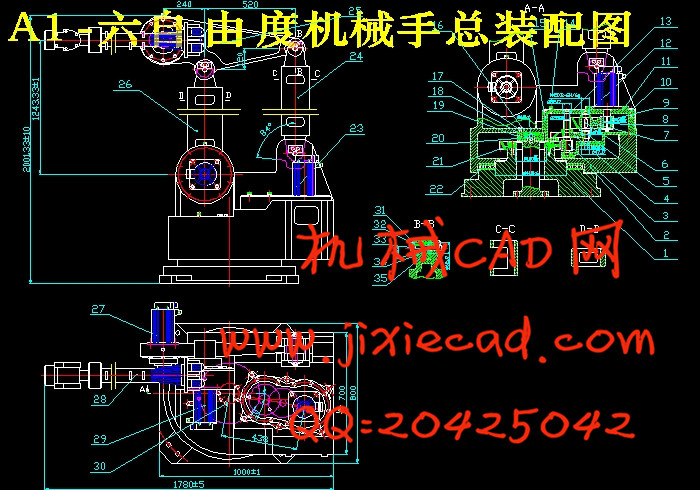
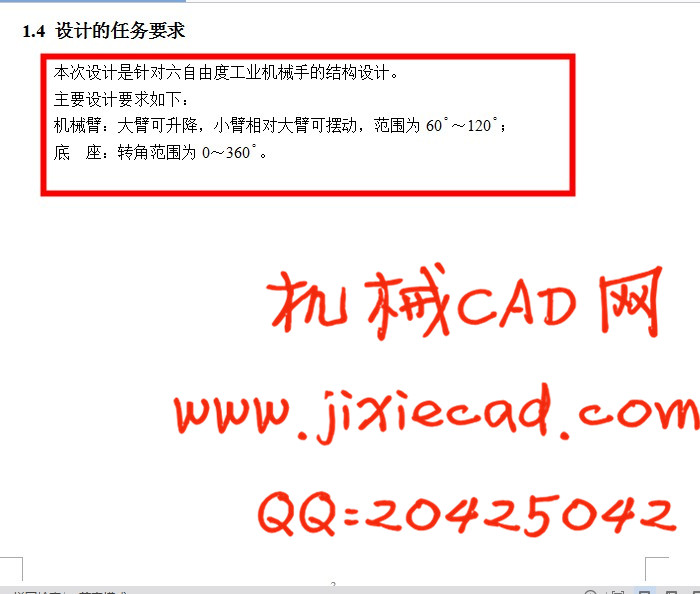
E. 整个机械臂安装在一个回转支座上,回转角度范围为360度;大臂可做升降运动;小臂相对于大臂可摆动,摆动范围为60-120度;小臂末端的手腕也可以摆动,摆动范围为-60度到+60度;手腕的末端安装一机械手,机械手具有开闭能力,用于直径30-45mm工件的抓取,工件长度350mm,重量8kg。
1 概述 1
1.1工业机械手的含义及技术概述 1
1.2工业机械手的组成 1
1.3工业机械手的现状及国内外发展趋势 2
1.4 设计的任务要求 3
2 机械手的结构分析 4
2.1总体结构的概述 4
2.2第一轴(大臂)的结构 5
2.3传动方案的确定 6
3 设计计算 8
4 传动结构的设计计算 10
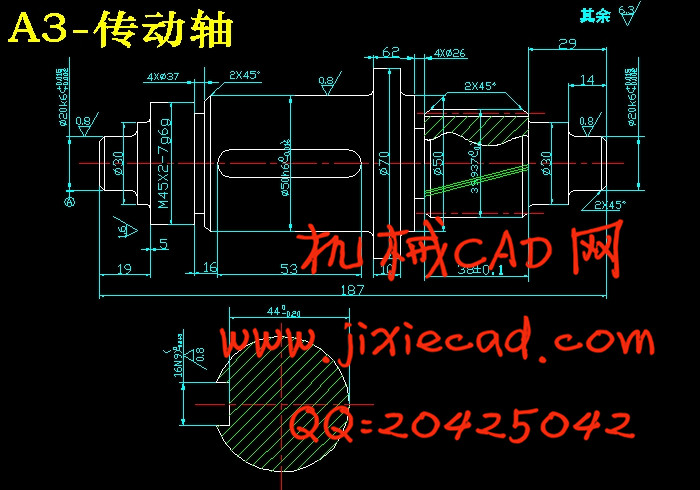
4.1第一轴的传动结构设计 10
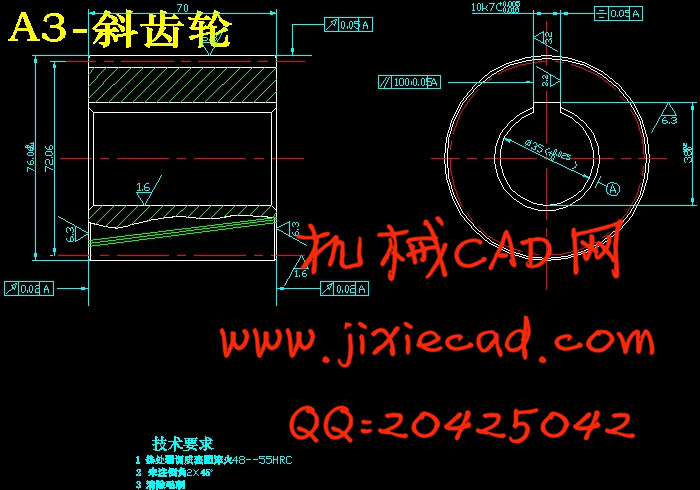
4.2斜齿轮传动轴上的轴承 22
5 机械手各零部件的结构设计 24
5.1转角范围的控制设计 24
5.2主要零部件的结构设计(第一臂与底座) 25
5.2.1 第一轴转臂的结构 26
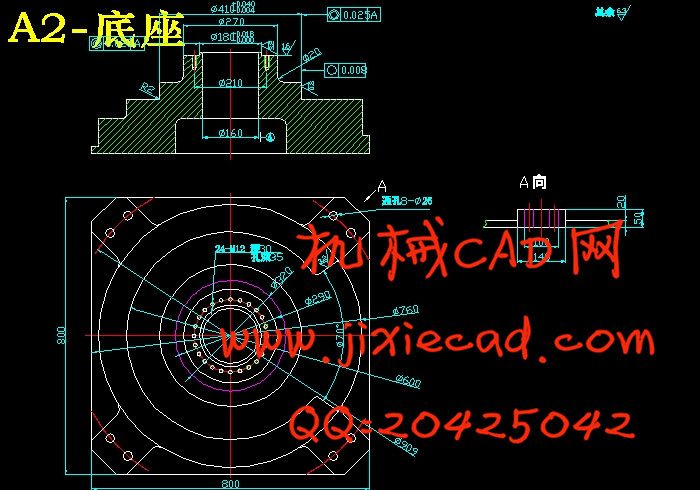
5.2.2底座的结构设计 26
6 机械手各自由度的连接过程及工程分析 26
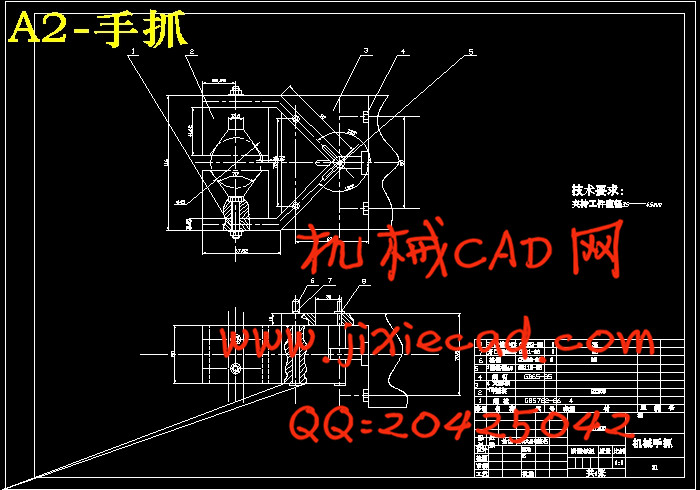
6.1手指和活塞 26
6.1.1回转机构 26
6.1.2旋转机构 26
6.2机械手的手指运动和力分析 27
6.2.1运动分析(adams) 27
6.2.2位移 28
6.2.3速度 28
6.2.4加速度 29
6.2.5手指模型应力分析 29
7 总结 30
参考文献 31
致谢 32
题目背景和意义: 机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。在工业生产中应用的机械手被称为“工业机械手”。生产中应用机械手可以提高生产的自动化水平和劳动生产率:可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。,通过该设计旨在锻炼学生运用现代设计方法基本原理进行设计和工程分析,使学生受到机械工程师基本训练。
题目内容主要包括三个方面,专用机械手设计,建模和工程分析:
A. 在设计方面要求依据设计参数,设计生产线专用机械手的方案,结构。
B.在建模方面要求建立专用机械手等的实体装配模型。对实体装配模型进行工程简化。
C. 在工程分析方面要求合理确定约束条件,分析机械手手指在生产中的变形量并对强度进行校核。
D. 运动分析方面要求提取六自由度机械手手指的速度,加速度,特性。并输出运动规律曲线
E. 整个机械臂安装在一个回转支座上,回转角度范围为360度;大臂可做升降运动;小臂相对于大臂可摆动,摆动范围为60-120度;小臂末端的手腕也可以摆动,摆动范围为-60度到+60度;手腕的末端安装一机械手,机械手具有开闭能力,用于直径30-45mm工件的抓取,工件长度350mm,重量8kg。
工业机械手设计及运动结构分析
摘 要
在加速科技进步中,机械制造业的发展起着关键的作用,其任务是在工业生产中迅速将工艺装备的独立单元变为自动化综合体(自动化工段,生产线和自动化车间),将来甚至实现自动化工厂。这种自动化生产最重要的特点是具有柔性,它能预料到,在节省劳力(或无人)情况下,根据工艺条件调整装配,以适应多种产品生产。
当代柔性自动化生产的建立和广泛应用,取决于作为科技进步的催化剂的机床制造、机械手技术、计算机技术、微电子技术、仪器制造等技术的加速发展。工业机械手是多品种的经常更换产品的生产过程自动化的通用手段。在机械制造中,工业机械手既有效地用于柔性生产系统组成工艺装备的基本工序中,也有效地用于辅助操作中。工业机械手与传统自动化手段不同之处,首先在于它在各种生产功能上的通用性和重新调整的柔性。在柔性生产系统中,工业机械手广泛应用于数控机床、锻压机床、铸造机械和仓储设备上,以完成传送装备和其它操作。工业机械手和基本工艺装备、辅助手段以及控制装置一起形成各种不同形式的机械手技术综合体—柔性生产系统基本结构模块。
随着工业技术和经济的惊人发展,工业机械手技术也将得到迅速发展。应用工业机械手是提高生产过程自动化,改善劳动环境条件,提高产品质量和生产效率手段之一。
本次设计是根据对工业六自由度机械手的总体结构及传动系统的分析和探讨,进行六自由度工业机械手的结构设计。在设计中XXXX老师给予了很大的指导和帮助,在此谨致谢意。
限于水平,本设计难免有缺点、错误,恳请各位老师批评指正。
关键词:自动化生产;工业机械手;六自由度
摘 要
在加速科技进步中,机械制造业的发展起着关键的作用,其任务是在工业生产中迅速将工艺装备的独立单元变为自动化综合体(自动化工段,生产线和自动化车间),将来甚至实现自动化工厂。这种自动化生产最重要的特点是具有柔性,它能预料到,在节省劳力(或无人)情况下,根据工艺条件调整装配,以适应多种产品生产。
当代柔性自动化生产的建立和广泛应用,取决于作为科技进步的催化剂的机床制造、机械手技术、计算机技术、微电子技术、仪器制造等技术的加速发展。工业机械手是多品种的经常更换产品的生产过程自动化的通用手段。在机械制造中,工业机械手既有效地用于柔性生产系统组成工艺装备的基本工序中,也有效地用于辅助操作中。工业机械手与传统自动化手段不同之处,首先在于它在各种生产功能上的通用性和重新调整的柔性。在柔性生产系统中,工业机械手广泛应用于数控机床、锻压机床、铸造机械和仓储设备上,以完成传送装备和其它操作。工业机械手和基本工艺装备、辅助手段以及控制装置一起形成各种不同形式的机械手技术综合体—柔性生产系统基本结构模块。
随着工业技术和经济的惊人发展,工业机械手技术也将得到迅速发展。应用工业机械手是提高生产过程自动化,改善劳动环境条件,提高产品质量和生产效率手段之一。
本次设计是根据对工业六自由度机械手的总体结构及传动系统的分析和探讨,进行六自由度工业机械手的结构设计。在设计中XXXX老师给予了很大的指导和帮助,在此谨致谢意。
限于水平,本设计难免有缺点、错误,恳请各位老师批评指正。
关键词:自动化生产;工业机械手;六自由度
Industrial Robot Design And Sports Structure Analysis
Abstract
Technological advances in accelerating the development of the manufacturing industry, mechanical plays a key role, its duty is in industrial production in the process equipment quickly independent modules into automation complexes, production line and automation sections of automation, workshop) even realizes automatic factory in the future. The automation production of the most important features is a flexible, it can predict that the labor-saving (or unmanned) cases, according to the process conditions adjustment to adapt to the various product assembly production.
The establishment of contemporary flexible automation production and application, as the catalyst and technological progress depends on the machine manufacturing, manipulator technology, computer technology, microelectronics technology, equipment manufacturing techniques, such as accelerating. Industrial manipulator is varieties replace frequently production process automation general means. In mechanical manufacturing, industrial robots effectively already for a flexible manufacturing system composition technological equipment basic working procedure, also effectively used to assist the operation. Industrial robots and traditional automation means differences in various production is firstly it on the function of universality and readjust the flexible. In flexible production systems, industrial robots are widely used in nc machine tools, forming machins tooles, casting machinery and warehousing equipment to complete transmission equipment and other operations. Industrial robots and basic technology and equipment, the auxiliary means and control devices formed together various forms of manipulator - flexible production technology complex basic system structure module.
With the industrial technology and the impressive economic development of industrial robots technology will also, rapid development. Application of industrial robots is to improve the production process automation, improve working conditions, improve product quality and production efficiency means one.
The design is based on industrial six degrees of freedom of the manipulator general structure and the transmission system is analyzed and discussed, the structure of the manipulator of industrial design. Mr Qian gave great learning the guidance and assistance in this to cause gratitude.
Limited to level, this design has to avoid shortcoming, the error, ask everybody the teacher criticism and corrections.
Abstract
Technological advances in accelerating the development of the manufacturing industry, mechanical plays a key role, its duty is in industrial production in the process equipment quickly independent modules into automation complexes, production line and automation sections of automation, workshop) even realizes automatic factory in the future. The automation production of the most important features is a flexible, it can predict that the labor-saving (or unmanned) cases, according to the process conditions adjustment to adapt to the various product assembly production.
The establishment of contemporary flexible automation production and application, as the catalyst and technological progress depends on the machine manufacturing, manipulator technology, computer technology, microelectronics technology, equipment manufacturing techniques, such as accelerating. Industrial manipulator is varieties replace frequently production process automation general means. In mechanical manufacturing, industrial robots effectively already for a flexible manufacturing system composition technological equipment basic working procedure, also effectively used to assist the operation. Industrial robots and traditional automation means differences in various production is firstly it on the function of universality and readjust the flexible. In flexible production systems, industrial robots are widely used in nc machine tools, forming machins tooles, casting machinery and warehousing equipment to complete transmission equipment and other operations. Industrial robots and basic technology and equipment, the auxiliary means and control devices formed together various forms of manipulator - flexible production technology complex basic system structure module.
With the industrial technology and the impressive economic development of industrial robots technology will also, rapid development. Application of industrial robots is to improve the production process automation, improve working conditions, improve product quality and production efficiency means one.
The design is based on industrial six degrees of freedom of the manipulator general structure and the transmission system is analyzed and discussed, the structure of the manipulator of industrial design. Mr Qian gave great learning the guidance and assistance in this to cause gratitude.
Limited to level, this design has to avoid shortcoming, the error, ask everybody the teacher criticism and corrections.
Key Words: Automation production; Special manipulator; Six degrees of freedom
目 录1 概述 1
1.1工业机械手的含义及技术概述 1
1.2工业机械手的组成 1
1.3工业机械手的现状及国内外发展趋势 2
1.4 设计的任务要求 3
2 机械手的结构分析 4
2.1总体结构的概述 4
2.2第一轴(大臂)的结构 5
2.3传动方案的确定 6
3 设计计算 8
4 传动结构的设计计算 10
4.1第一轴的传动结构设计 10
4.2斜齿轮传动轴上的轴承 22
5 机械手各零部件的结构设计 24
5.1转角范围的控制设计 24
5.2主要零部件的结构设计(第一臂与底座) 25
5.2.1 第一轴转臂的结构 26
5.2.2底座的结构设计 26
6 机械手各自由度的连接过程及工程分析 26
6.1手指和活塞 26
6.1.1回转机构 26
6.1.2旋转机构 26
6.2机械手的手指运动和力分析 27
6.2.1运动分析(adams) 27
6.2.2位移 28
6.2.3速度 28
6.2.4加速度 29
6.2.5手指模型应力分析 29
7 总结 30
参考文献 31
致谢 32