设计简介
摘 要
目前PC已广泛应用于冶金、化工、轻工、机械、电力、建筑、交通、运输等各行各业。
随着机电一体化的发展,对不系统的可靠性要求愈来愈高。可编程控制器有控制可靠,体积小,功能强,速度快,组态灵活和可扩展的特点而得到广泛的应用。可编程控制器是20世纪60年代末在继电器控制系统的基础上开发出来的。最初叫做可编程逻辑控制器,(programmable logic controller)即PLC。
在我国,PC的应用最近几年发展很快。首当先应用一些大中型现代化工厂的引进工程上,如上海宝山钢铁总厂一、二期工程中就使用了PC达857台。武汉钢铁厂和首都钢铁厂等大型钢铁企业也都使用了许多PC。
在老企业旧设备的技术改造上,PC的应用比较广泛,而且已取得了可喜的经济效益。
PC是专为工业控制设计的控制装置,能适应工业现场的恶劣环境,例如:
电源电压:AC220V±15%。
抗振强度:16.7Hz,3mm双振幅(X、Y、Z三个方向各30min)。
工作温度:0~55℃,有的甚至可以是-10~55℃。
存放温度:-20~60℃。
湿度:35~90%RH无凝结。
关键词 T68式卧式镗床;有限元;PRO/E;PLC;
目 录
前言………………………………………………………………………1
第1章 PLC的介绍 ………………………………………………………5
1.1 PLC的主要功能…………………………………………………6
1.2 PLC的特点………………………………………………………7
1.3 PLC的应用………………………………………………………9
第2章 镗床电气系统及电气原理…………………………………….11
2.3 镗床概述 …………………………………………………….11
2.4 T68卧式镗床的电气控制线路……………………………….12
2.4 T68镗床电器线路的控制原理……………………………….13
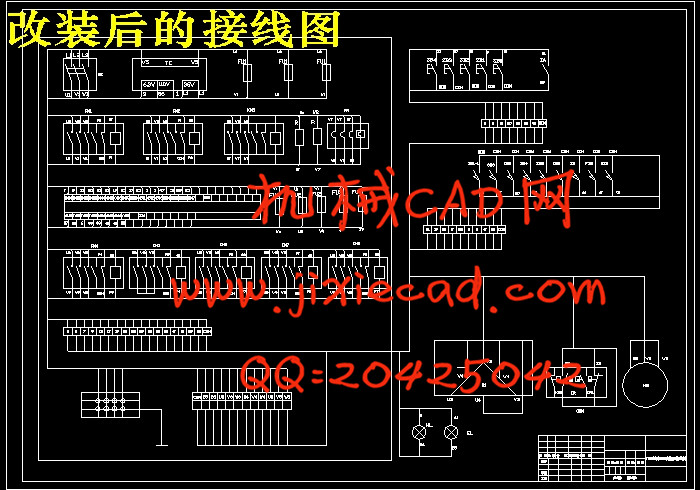
第3章 镗床的改造 ……………………………………………………16
3.1 了解情况………………………………………………………16
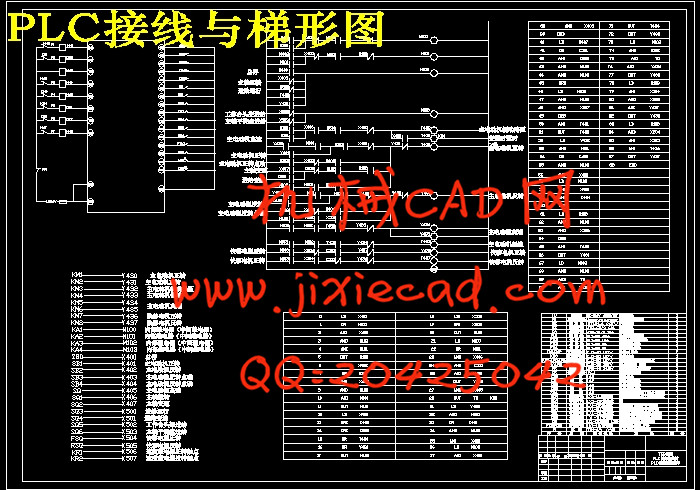
3.2 确定PLC的输入输出 …………………………………………17
3.3 编制梯形图……………………………………………………17
第4章 梯形图的分析 …………………………………………………21
4.1 正、反转控制…………………………………………………21
4.2 低速的转换……………………………………………………21
4.3 反接制动………………………………………………………21
4.4 点动控制………………………………………………………21
4.5 快移电动机的控制……………………………………………21
结束语 …………………………………………………………………22
参考文献 ………………………………………………………………23
致谢 ……………………………………………………………………24
目前PC已广泛应用于冶金、化工、轻工、机械、电力、建筑、交通、运输等各行各业。
随着机电一体化的发展,对不系统的可靠性要求愈来愈高。可编程控制器有控制可靠,体积小,功能强,速度快,组态灵活和可扩展的特点而得到广泛的应用。可编程控制器是20世纪60年代末在继电器控制系统的基础上开发出来的。最初叫做可编程逻辑控制器,(programmable logic controller)即PLC。
在我国,PC的应用最近几年发展很快。首当先应用一些大中型现代化工厂的引进工程上,如上海宝山钢铁总厂一、二期工程中就使用了PC达857台。武汉钢铁厂和首都钢铁厂等大型钢铁企业也都使用了许多PC。
在老企业旧设备的技术改造上,PC的应用比较广泛,而且已取得了可喜的经济效益。
PC是专为工业控制设计的控制装置,能适应工业现场的恶劣环境,例如:
电源电压:AC220V±15%。
抗振强度:16.7Hz,3mm双振幅(X、Y、Z三个方向各30min)。
工作温度:0~55℃,有的甚至可以是-10~55℃。
存放温度:-20~60℃。
湿度:35~90%RH无凝结。
关键词 T68式卧式镗床;有限元;PRO/E;PLC;
目 录
前言………………………………………………………………………1
第1章 PLC的介绍 ………………………………………………………5
1.1 PLC的主要功能…………………………………………………6
1.2 PLC的特点………………………………………………………7
1.3 PLC的应用………………………………………………………9
第2章 镗床电气系统及电气原理…………………………………….11
2.3 镗床概述 …………………………………………………….11
2.4 T68卧式镗床的电气控制线路……………………………….12
2.4 T68镗床电器线路的控制原理……………………………….13
第3章 镗床的改造 ……………………………………………………16
3.1 了解情况………………………………………………………16
3.2 确定PLC的输入输出 …………………………………………17
3.3 编制梯形图……………………………………………………17
第4章 梯形图的分析 …………………………………………………21
4.1 正、反转控制…………………………………………………21
4.2 低速的转换……………………………………………………21
4.3 反接制动………………………………………………………21
4.4 点动控制………………………………………………………21
4.5 快移电动机的控制……………………………………………21
结束语 …………………………………………………………………22
参考文献 ………………………………………………………………23
致谢 ……………………………………………………………………24