设计简介
关节型机器人腰部结构设计
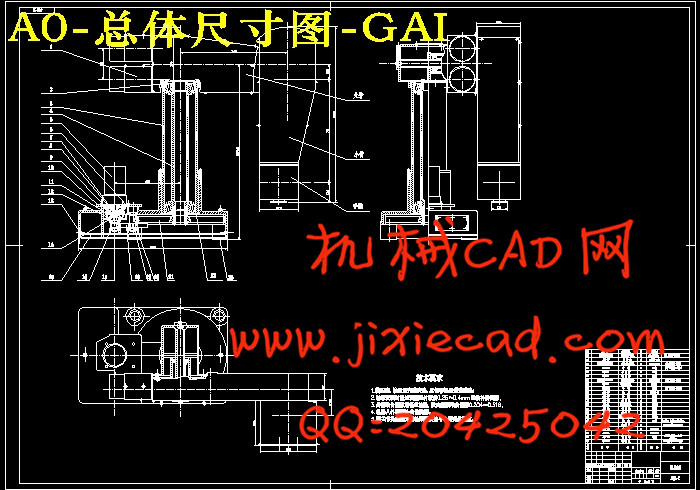
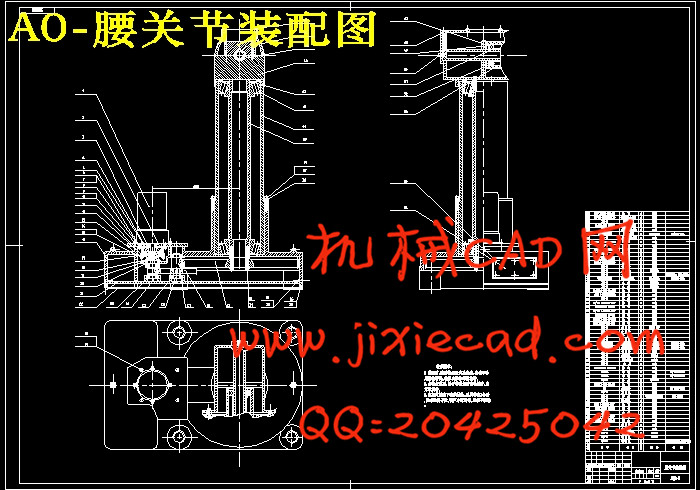
摘要: 为了提高生产效率和产品的焊接质量,满足实际工作需要,本课题设计了用于焊接的关节型机器人。根据机器人的工作要求和结构特点,进行了机器人的总体设计,确定了机器人的外形尺寸和工作空间,拟定了机器人各关节的总体传动方案,对机器人腰关节结构进行了详细设计,合理布置了电机和齿轮,确定了各级传动参数,进行了齿轮、轴和轴承的设计计算和校核。利用齐次变换矩阵法建立了六自由度关节机器人的正运动学模型,求出机器人末端相对于各自参考坐标系的齐次坐标值,建立了在直角坐标空间内机器人末端执行器的位置和姿态与关节变量值的对应关系。基于几何投影原理推导出相应的逆运动学模型,求出了各个关节的角度值,建立了机器人关节空间与世界空间的映射关系。该机器人具有刚性好,位置精度高、运行平稳的特点。
关键词:关节型机器人;位姿分析;总体设计;腰部结构设计
The waist structural design of articulated robot
Abstract : In order to improve the efficiency of production and welding quality of products and meet real work's needs, this subject has designed the articulated robot used for welding . According to the job requirements for the robot and structure characteristic , I have carried on the overall design of the robot, confirmed the external dimension and workspace of the robot, drafted the overall transmission scheme of every joint of the robot. I have designed the waist structure of the robot in detail, assigned the electrical machinery and gear wheel rationally, confirmed at all level transmission parameters , carried on the design and calculating of gear wheels , shafts and bearings and checking them.The kinematic model of robot system has been built up by means of the homogenous transformation of matrix in this thesis and deduces the robot's homogenous coordinate which is relative to its reference coordinate. We also make up the position relationship between the robot's end effector and the variable friable of every joint. The inverse kinematic model is deduced which based on the projection principle of geometry and the value of angle is worked out. What’s more, the relationship is built up between the joint space of robot and the world space. This robot has the characteristics of fine rigidity , position precision high , that operate steadily.
Key words: Articulated robot; Appearance analysis in the location; Design overallly; Waist articulated structural design of the robot
目 录
1 前言…………………………………………………………………………………1
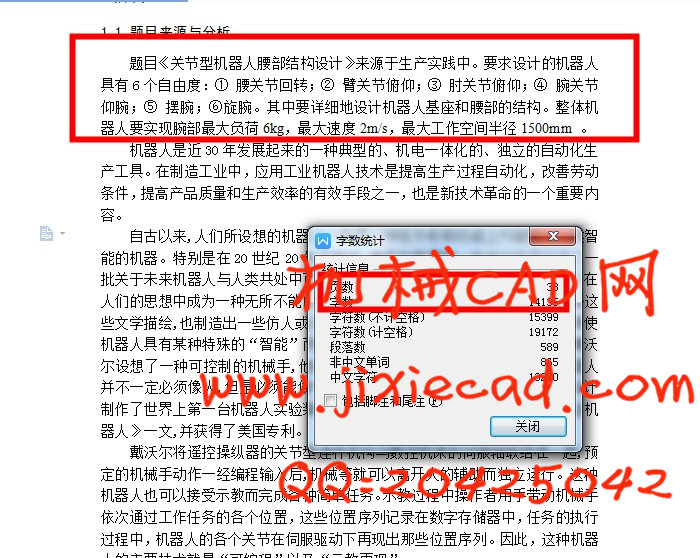
1.1 题目来源及分析…………………………………………………………………1
1.2 研究目的…………………………………………………………………………2
1.3国内外发展及研究现状…………………………………………………………2
2 关节型机器人总体设计……………………………………………………………4
2.1 确定基本技术参数………………………………………………………………4
2.1.1机械结构类型的选择…………………………………………………………4
2.1.2 额定负载………………………………………………………………………5
2.1.3 工作范围………………………………………………………………………5
2.1.4 操作机的驱动系统设计………………………………………………………5
2.1.5 控制系统的选择………………………………………………………………6
2.1.6 确定关节型机器人手臂的配置形式…………………………………………6
2.2 关节型机器人本体结构设计……………………………………………………7
3 关节型机器人腰部结构设计…………………………………………………… 10
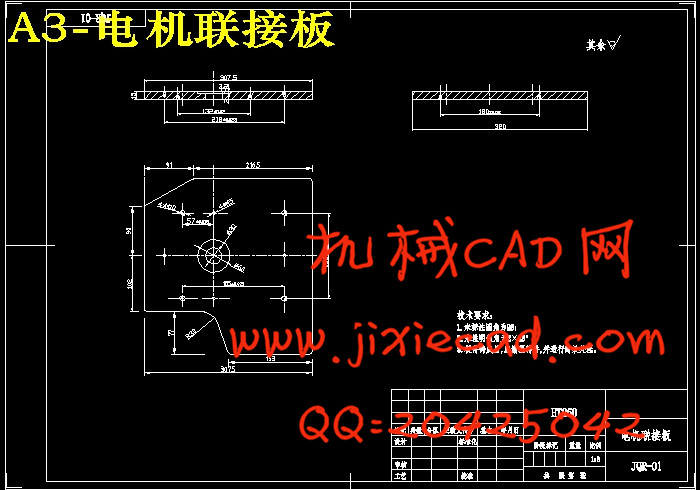
3.1 电动机的选择…………………………………………………………………10
3.2 计算传动装置的总传动比及分配各级传动比………………………………12
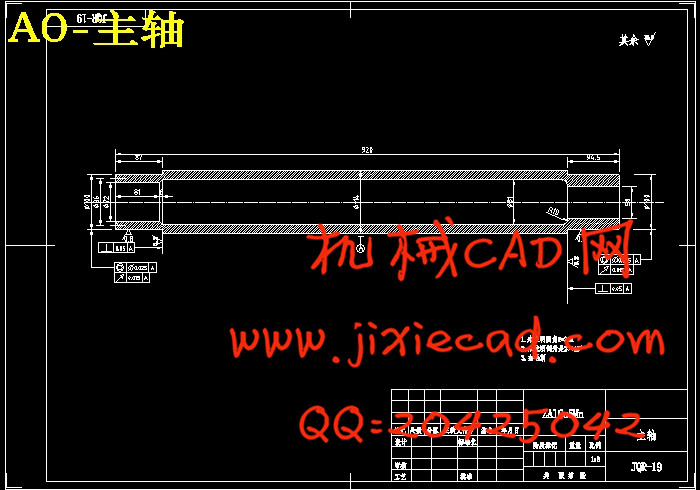
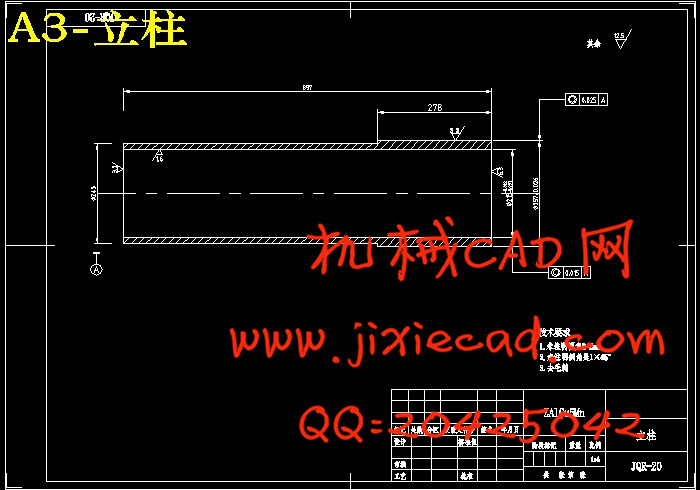
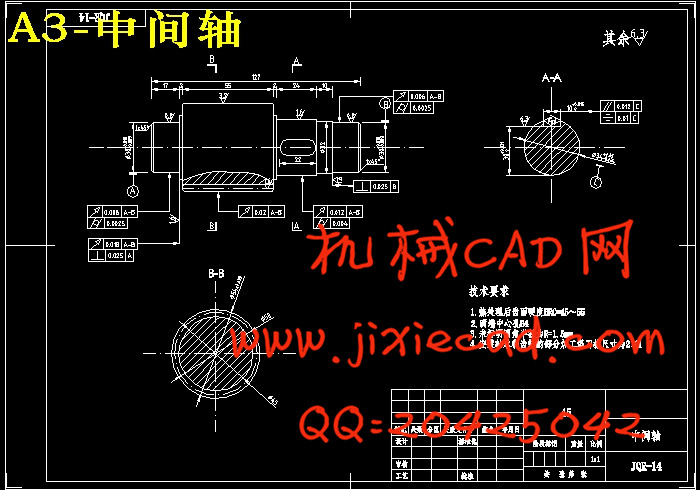
3.3 轴的设计计算…………………………………………………………………12
3.3.1 计算各轴转速、转矩和输入功率……………………………………………12
3.3.2 确定三根轴的具体尺寸……………………………………………………13
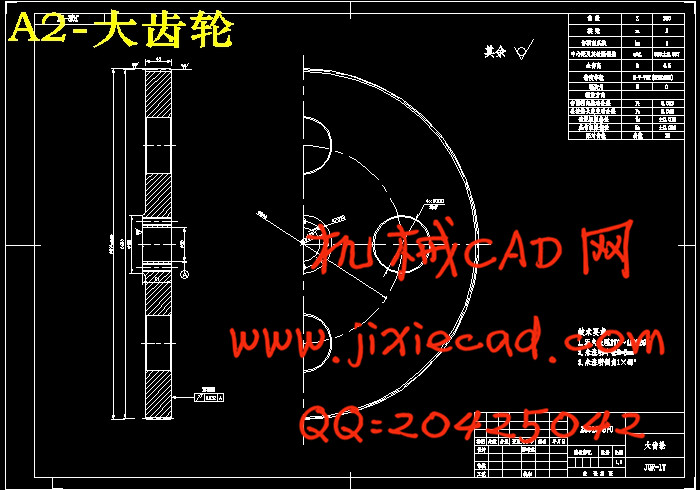
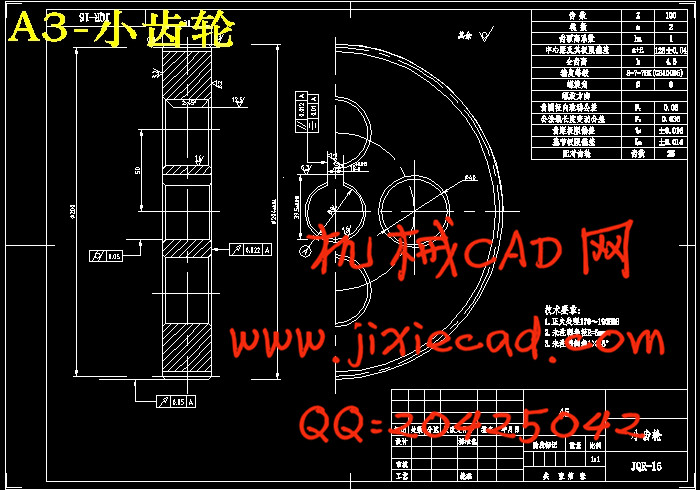
3.4 确定齿轮的参数………………………………………………………………17
3.4.1 选择材料……………………………………………………………………17
3.4.2 压力角的选择………………………………………………………………17
3.4.3 齿数和模数的选择…………………………………………………………17
3.4.4 齿宽系数的确定……………………………………………………………17
3.4.5 确定齿轮传动的精度………………………………………………………18
3.4.6 齿轮的校核…………………………………………………………………19
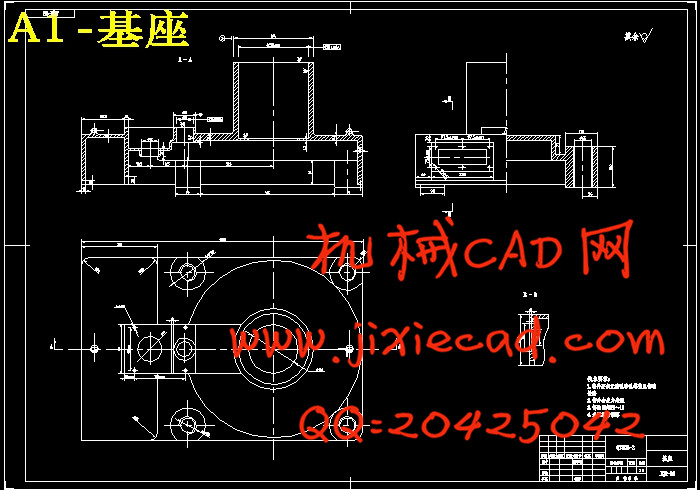
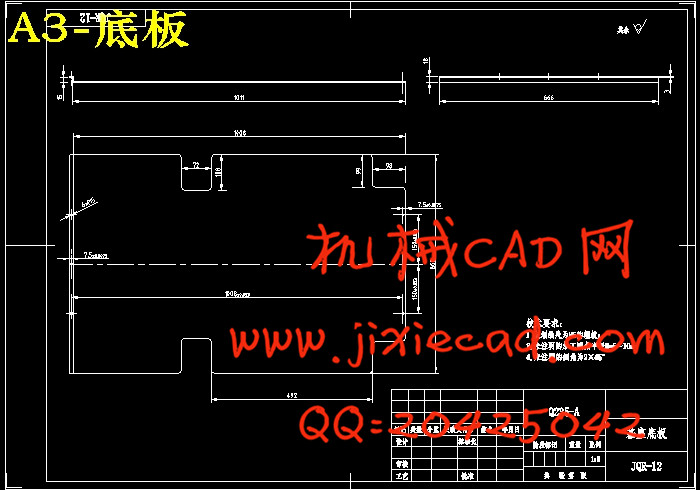
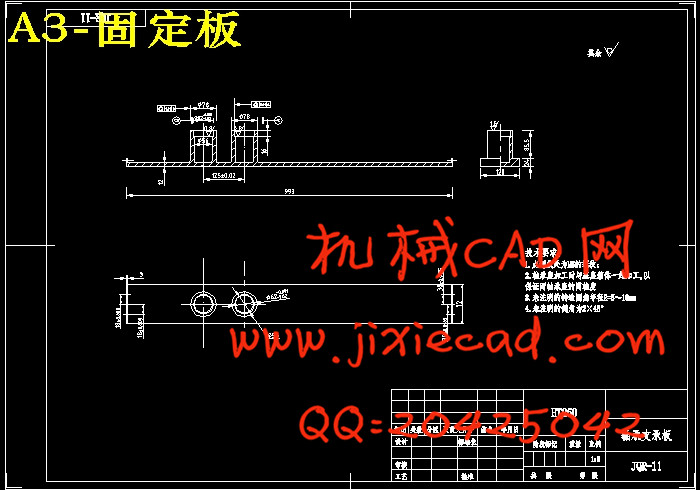
3.5 壳体设计………………………………………………………………………22
4 关节型机器人的位姿分析………………………………………………………23
4.1 机器人的位姿与运动的描述…………………………………………………23
4.2 关节型机器人的广义连杆变换矩阵…………………………………………23
4.3 关节型机器人运动方程………………………………………………………26
4.3.1 关节型机器人运动分析……………………………………………………26
4.3.2 关节型机器人运动反解……………………………………………………29
5 结论………………………………………………………………………………34
参考文献……………………………………………………………………………35
附录……………………………………………………………………………
摘要: 为了提高生产效率和产品的焊接质量,满足实际工作需要,本课题设计了用于焊接的关节型机器人。根据机器人的工作要求和结构特点,进行了机器人的总体设计,确定了机器人的外形尺寸和工作空间,拟定了机器人各关节的总体传动方案,对机器人腰关节结构进行了详细设计,合理布置了电机和齿轮,确定了各级传动参数,进行了齿轮、轴和轴承的设计计算和校核。利用齐次变换矩阵法建立了六自由度关节机器人的正运动学模型,求出机器人末端相对于各自参考坐标系的齐次坐标值,建立了在直角坐标空间内机器人末端执行器的位置和姿态与关节变量值的对应关系。基于几何投影原理推导出相应的逆运动学模型,求出了各个关节的角度值,建立了机器人关节空间与世界空间的映射关系。该机器人具有刚性好,位置精度高、运行平稳的特点。
关键词:关节型机器人;位姿分析;总体设计;腰部结构设计
The waist structural design of articulated robot
Abstract : In order to improve the efficiency of production and welding quality of products and meet real work's needs, this subject has designed the articulated robot used for welding . According to the job requirements for the robot and structure characteristic , I have carried on the overall design of the robot, confirmed the external dimension and workspace of the robot, drafted the overall transmission scheme of every joint of the robot. I have designed the waist structure of the robot in detail, assigned the electrical machinery and gear wheel rationally, confirmed at all level transmission parameters , carried on the design and calculating of gear wheels , shafts and bearings and checking them.The kinematic model of robot system has been built up by means of the homogenous transformation of matrix in this thesis and deduces the robot's homogenous coordinate which is relative to its reference coordinate. We also make up the position relationship between the robot's end effector and the variable friable of every joint. The inverse kinematic model is deduced which based on the projection principle of geometry and the value of angle is worked out. What’s more, the relationship is built up between the joint space of robot and the world space. This robot has the characteristics of fine rigidity , position precision high , that operate steadily.
Key words: Articulated robot; Appearance analysis in the location; Design overallly; Waist articulated structural design of the robot
目 录
1 前言…………………………………………………………………………………1
1.1 题目来源及分析…………………………………………………………………1
1.2 研究目的…………………………………………………………………………2
1.3国内外发展及研究现状…………………………………………………………2
2 关节型机器人总体设计……………………………………………………………4
2.1 确定基本技术参数………………………………………………………………4
2.1.1机械结构类型的选择…………………………………………………………4
2.1.2 额定负载………………………………………………………………………5
2.1.3 工作范围………………………………………………………………………5
2.1.4 操作机的驱动系统设计………………………………………………………5
2.1.5 控制系统的选择………………………………………………………………6
2.1.6 确定关节型机器人手臂的配置形式…………………………………………6
2.2 关节型机器人本体结构设计……………………………………………………7
3 关节型机器人腰部结构设计…………………………………………………… 10
3.1 电动机的选择…………………………………………………………………10
3.2 计算传动装置的总传动比及分配各级传动比………………………………12
3.3 轴的设计计算…………………………………………………………………12
3.3.1 计算各轴转速、转矩和输入功率……………………………………………12
3.3.2 确定三根轴的具体尺寸……………………………………………………13
3.4 确定齿轮的参数………………………………………………………………17
3.4.1 选择材料……………………………………………………………………17
3.4.2 压力角的选择………………………………………………………………17
3.4.3 齿数和模数的选择…………………………………………………………17
3.4.4 齿宽系数的确定……………………………………………………………17
3.4.5 确定齿轮传动的精度………………………………………………………18
3.4.6 齿轮的校核…………………………………………………………………19
3.5 壳体设计………………………………………………………………………22
4 关节型机器人的位姿分析………………………………………………………23
4.1 机器人的位姿与运动的描述…………………………………………………23
4.2 关节型机器人的广义连杆变换矩阵…………………………………………23
4.3 关节型机器人运动方程………………………………………………………26
4.3.1 关节型机器人运动分析……………………………………………………26
4.3.2 关节型机器人运动反解……………………………………………………29
5 结论………………………………………………………………………………34
参考文献……………………………………………………………………………35
附录……………………………………………………………………………