设计简介
摘 要
本文设计了一种用于半导体芯片自动化生产线中的搬运气动机械手。该机械手实现芯片的抓取、释放以及搬运等4个自由度的动作,结构合理,动作准确迅速,安全可靠性高。采用日本三菱公司的FX2N系列PLC对机械手的上下、左右、回转以及芯片吸取运动进行自动化控制。利用可编程技术结合相应的硬件装置控制机械手完成搬运动作,来配合和实现生产上的要求。该气动机械手作为特定工位的搬运机械手,能够取代国外进口的的多功能通用机械手,节约设备成本和维护成本80%以上,在自动化生产国产化进程中具有积极的意义。
本人在实习单位的工作中发现在自动化生产线中为了便于实现柔性制造,大部分机械手都是6自由度通用机械手,它采用模块化安装,改变工位动作时只需改变相应程序即可。然而用通用机械手去执行特定简单工位的动作,是一种生产资源的浪费。在当今社会追求高效,节约的大环境下,本人结合工作实际设计了一款能满足特殊工位使用的机械手。
关键词:机械手;PLC;气动控制;
Abstract
This paper show a Manipulator which is used for transport IC semiconductor chips. This mechanical arm can catch,release and transport the IC chips ,which is a 4-degree of freedom arm. It have a reasonably structured and a high safe reliability. The FX2N PLC which produced by Mitsubishi used to control the movements,such as up&down,right&left,turn round,catch&release. Programmable technology combining relevant hardware make the arm to meet the demand of manufacture. As designed for special function,the mechanical arm can substitute for imported multifunctional Manipulator that can save the cost of equipment and maintenance by more than 80% ,which have a active meaning during the automatic production's localization.
It is the English translation of the Chinese abstract. I found it in my internship that in oder to achieve flexible manufacture system,the vast majority number of mechanical arm are 6-DOF general mechanical arm. It adopt modularization install,we just need to enter the new PLC programs when the arm need to change the movement. However ,people enable general mechanical arm to implement the special&simple motion ,which is a waste of resources for production. In nowadays social environment which peoples seek the efficient and economical. Considered the practical situation, I designed the mechanical arm which meet the demand of special motion.
Key words: Manipulator; PLC; Pneumatic control
1 绪论 1
1.1 基于PLC的气动机械手设计的意义 1
1.2 机械手的国内外的发展概况 1
1.2.1 机械手的发展史 1
1.2.2 气动机械手的发展史和发展前景 3
1.3 本课题应达到的要求 5
2 机械手基本结构与控制任务 6
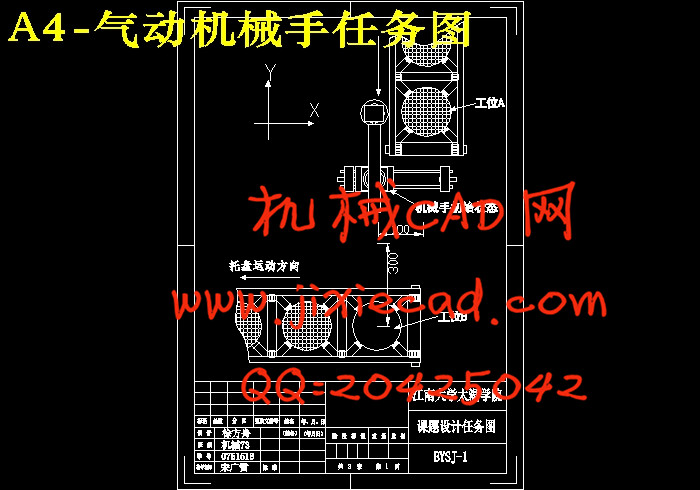
2.1 机械手的主要部件及运动 6
2.2 机械手的结构及技术参数列表 7
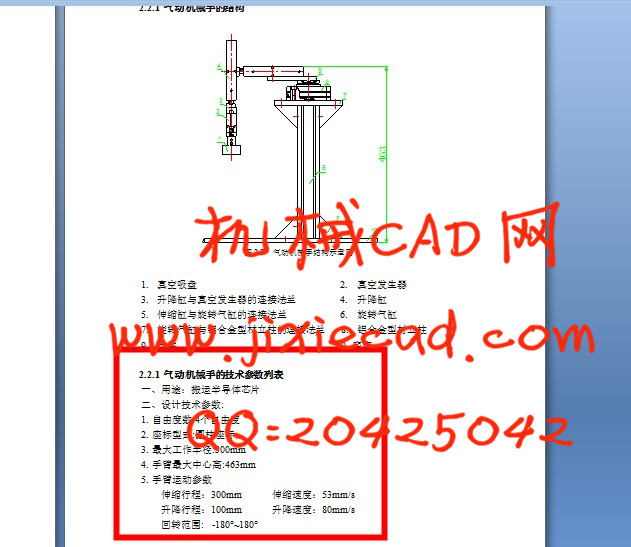
2.2.1 气动机械手的结构 7
2.2.1 气动机械手的技术参数列表 7
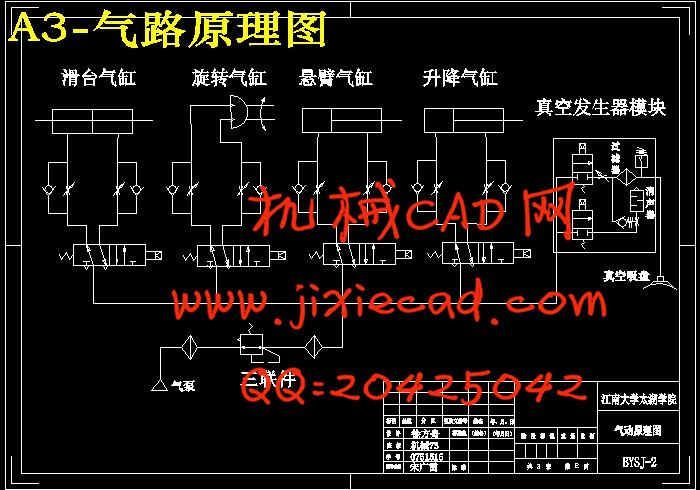
3 机械手气动系统设计 8
3.1 气压传动的组成及工作原理 8
3.1.1 气源装置及辅件 8
3.1.2 气动控制元件 9
3.1.3 气动执行元件 10
3.2 气压传动的优缺点 11
3.3 气动机械手的气缸的选用 12
3.3.1 滑台气缸的选用 13
3.3.2 旋转气缸的选用 13
3.3.3 悬臂气缸的选用 14
3.3.4 升降气缸的选用 15
3.3.5 模块化真空发生器和真空吸盘的选用 16
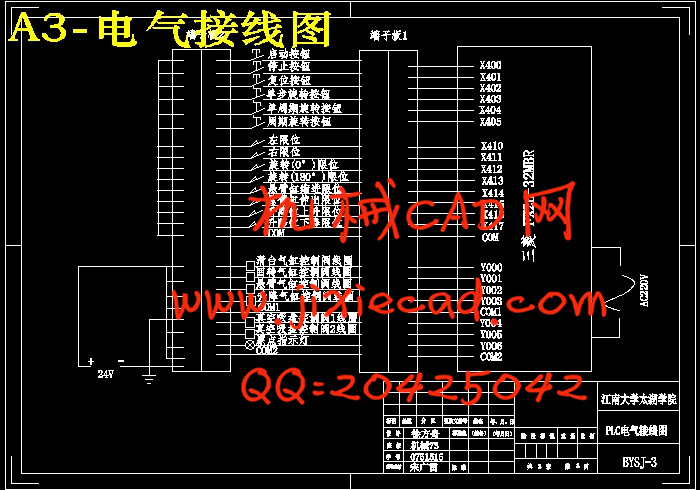
4 机械手电气系统设计 17
4.1 PLC简介 17
4.1.1 PLC内部原理 18
4.1.2 PLC的工作原理 20
4.1.3 PLC机型的选择方法 22
4.1.4 机械手PLC选择及参数 23
4.2 FX2N系列PLC 24
4.2.1 FX2N基本指令运用 25
5 机械手典型动作的PLC程序设计 27
5.1 电气气动控制( PLC控制)要求 27
5.2 PLC输入、输出点分配 28
5.3 机械手关键步骤PLC程序 30
6 结论与展望 2
6.1 结论 2
6.2 不足之处及未来展望 2
致 谢 3
参考文献 4
附录 5