设计简介
1 管道机器人的发展
1.1课题的背景及来源
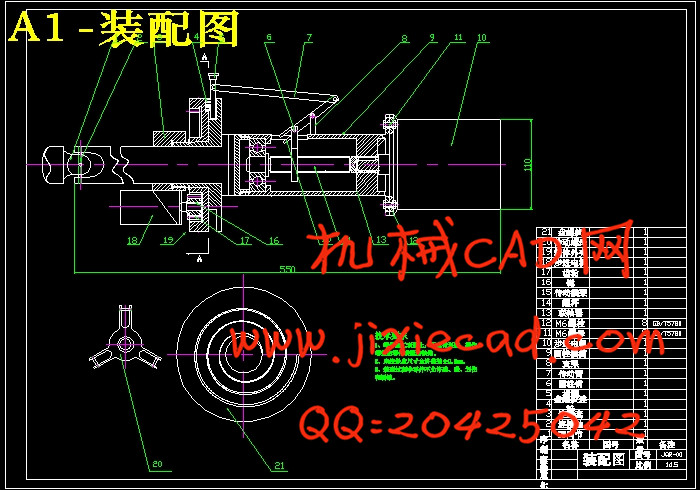
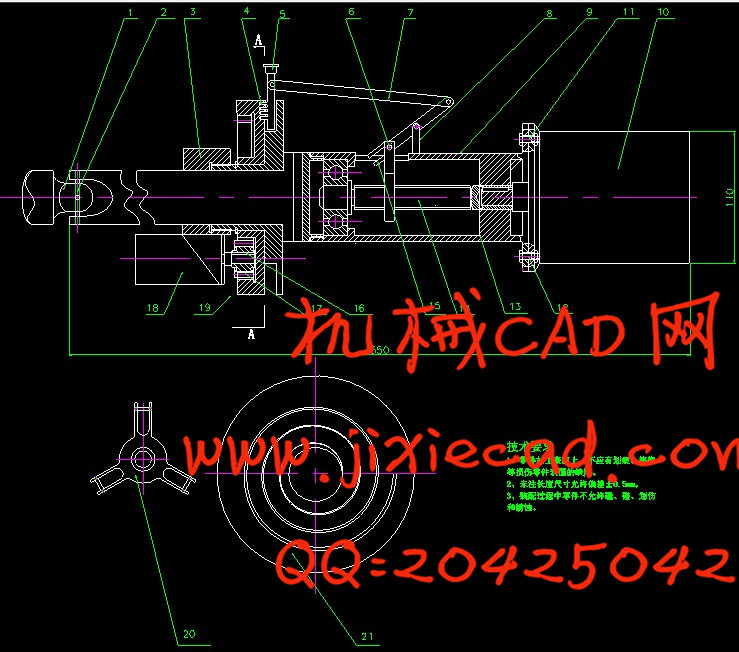
本课题来源于实际运输煤气作业中所遇到的困难,许多城市煤气回收萘不彻底,造成在主管道内结萘,管内萘堵塞管内面积超过50%以上,严重影响煤气的运输,以清除管内结萘为目标,着手研制此管内步伐式机器人。
1.2管内机器人发展综述
机器人是人类新世纪的伟大发明之一,是传统的机构学与近代电子技术相结合的产物,是计算机科学、控制论、机构学、信息科学和传感技术等多学科综合性高科技产物,它是一种仿人操作、高速运行、重复操作和精度较高的自动化设备,机器人技术的出现和发展,不但使传统的工业生产和科学研究发生根本性的变化,而且将对人类的社会生活产生深远的影响。科学技术是第一生产力,在各国之间综合国力的竞争,很大程度上取决于高技术之间的竞争,作为机电一体化的最高成就——机器人技术作为高技术的一个重要分支,普遍受到了各国的重视,随着计算机技术和现代设计制造水平的不断提高,极大的推进了机器人的发展,现代机器人已经成为了一个庞大的家族。
1.2.1机器人的定义
机器人技术是一种面向未来的现代化技术,机器人技术与网络技术、基因技术、通信技术、计算机技术等一样,属于高新技术。它设计的学科有材料科学、计算机技术、控制技术、传感器技术、微电子技术、通讯技术、人工智能、数学方法、仿生学等等很多学科,所以机器人的定义也是多种多样的,其原因是它具有一定的模糊性。目前有几个国际公认的定义:
1979年美国机器人协会将机器人定义为:“可重复编程的多功能操纵器,设计成通过不同的编程动作为执行多种任务移动原料、部件。工具或专门的设备。”
1984年12月国际标准化组织中的工业自动化系统委员会所属工业用机器人分会作出的定义:机器人是一种自动控制下通过变成可完成某些操作或移动作业的机器。
1988年法国的埃斯皮奥将机器人学定义为:机器人学是指设计能根据传感器信息实现预先规划好的作业系统,并以此系统的使用方法作为研究对象。
我国科学家对机器人的定义是:“机器人是一种自动化的机器,所不同的是这种机器人具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器”。
1.1课题的背景及来源
本课题来源于实际运输煤气作业中所遇到的困难,许多城市煤气回收萘不彻底,造成在主管道内结萘,管内萘堵塞管内面积超过50%以上,严重影响煤气的运输,以清除管内结萘为目标,着手研制此管内步伐式机器人。
1.2管内机器人发展综述
机器人是人类新世纪的伟大发明之一,是传统的机构学与近代电子技术相结合的产物,是计算机科学、控制论、机构学、信息科学和传感技术等多学科综合性高科技产物,它是一种仿人操作、高速运行、重复操作和精度较高的自动化设备,机器人技术的出现和发展,不但使传统的工业生产和科学研究发生根本性的变化,而且将对人类的社会生活产生深远的影响。科学技术是第一生产力,在各国之间综合国力的竞争,很大程度上取决于高技术之间的竞争,作为机电一体化的最高成就——机器人技术作为高技术的一个重要分支,普遍受到了各国的重视,随着计算机技术和现代设计制造水平的不断提高,极大的推进了机器人的发展,现代机器人已经成为了一个庞大的家族。
1.2.1机器人的定义
机器人技术是一种面向未来的现代化技术,机器人技术与网络技术、基因技术、通信技术、计算机技术等一样,属于高新技术。它设计的学科有材料科学、计算机技术、控制技术、传感器技术、微电子技术、通讯技术、人工智能、数学方法、仿生学等等很多学科,所以机器人的定义也是多种多样的,其原因是它具有一定的模糊性。目前有几个国际公认的定义:
1979年美国机器人协会将机器人定义为:“可重复编程的多功能操纵器,设计成通过不同的编程动作为执行多种任务移动原料、部件。工具或专门的设备。”
1984年12月国际标准化组织中的工业自动化系统委员会所属工业用机器人分会作出的定义:机器人是一种自动控制下通过变成可完成某些操作或移动作业的机器。
1988年法国的埃斯皮奥将机器人学定义为:机器人学是指设计能根据传感器信息实现预先规划好的作业系统,并以此系统的使用方法作为研究对象。
我国科学家对机器人的定义是:“机器人是一种自动化的机器,所不同的是这种机器人具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器”。