设计简介
摘要
概念设计是并联机床设计的首要环节,其目的是在给定所需自由度条件
下,寻求含一个主刚体(动平台)的并联机构杆副配置、驱动方式和总体布局的各种可能组合。
按照支链中所含伺服作动器数目不同,并联机床可大致分为并联、串并联和混联3种类型。前两者在一条支链中仅含一个或一个以上的作动器,以直接生成3~6个自由度;而后者则通过2个或多个少自由度并联或串联机构的串接组合生成所需的自由度。按照作动器在支链中的位置不同,并联机床可采用内副和外副驱动,且一般多采用线性驱动单元,如伺服电机—滚珠丝杠螺母副或直线电机等。机架结构的变化可使得并联机床的总体布局具有多样性,但同时也使工作空间的大小、形状以及运动灵活度产生很大差异。因此,在制定总体布局方案时,应采用概念设计与运动学设计交互方式,并根据特定要求做出决策。
通过更换末端执行器便可在单机上实现多种数控作业是并联机床的优点之一。然而由于受到铰约束、支链干涉、特别是位置与姿态耦合等因素的影响,致使动平台实现姿态能力有限是各种6自由度纯并联机构的固有缺陷,难于适应大倾角多坐标数控作业的需要。目前并联机床一个重要的发展趋势是采用混联机构分别实现平动和转动自由度。这种配置不但可使平动与转动控制解耦,而且具有工作空间大和可重组性强等优点。特别是由于位置正解存在解析解答,故为数控编程和误差补偿提供了极大的方便。应该强调,传统机床的发展已有数百年历史,任何希望从纯机构学角度创新而试图完全摒弃传统机床结构布局与制造工艺合理部分的设想都将是有失偏颇的。
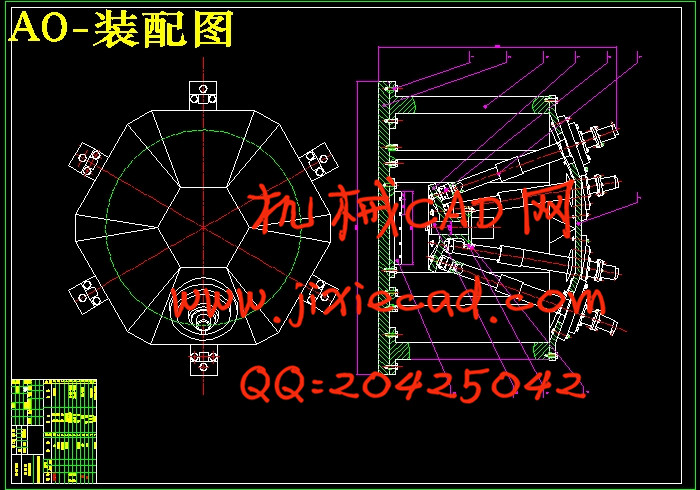
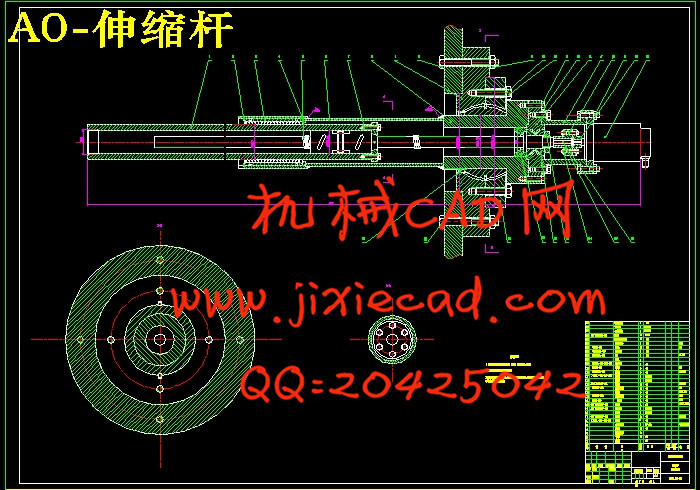
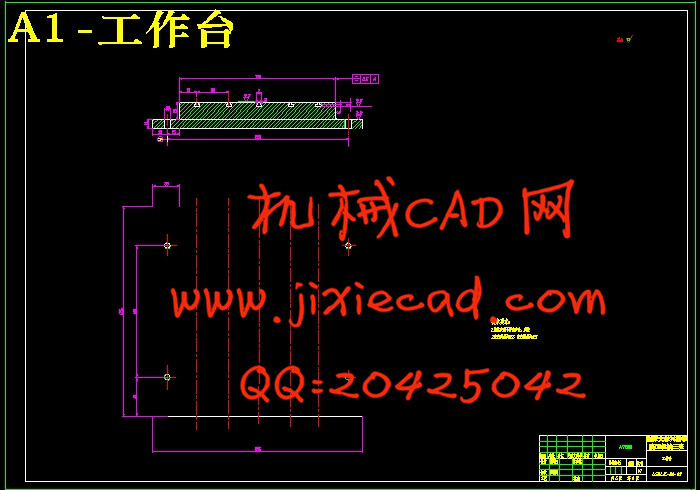
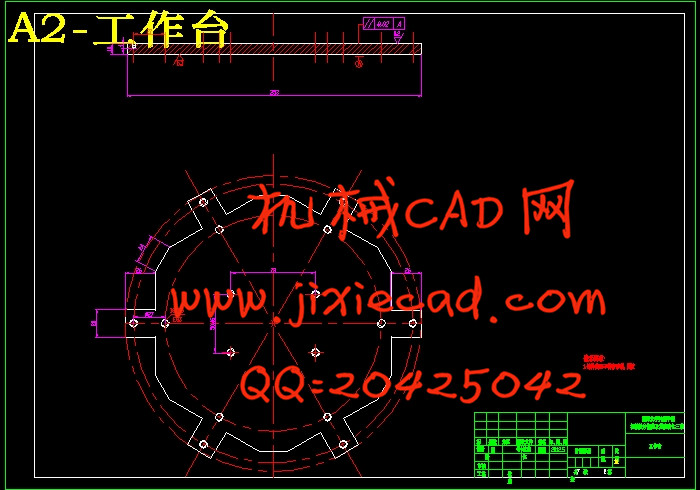
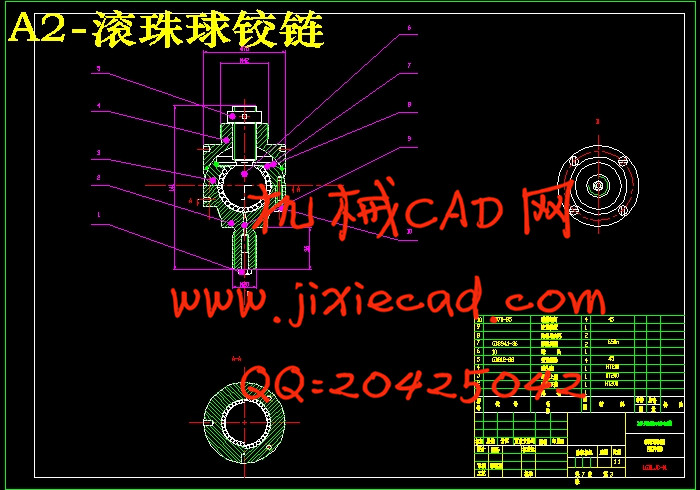
本次设计的是由6根伸缩杆连接固定平台(机床的框架)和动平台(主轴部件),机床的6边形框架是固定平台,6根伸缩杆通过铰链成60度角分布在框架上,杆件的支撑点是固定的,而杆件的长度是可变的,即可伸缩的。6根伸缩杆的另一端,则通过铰链与装有主轴部件的动平台相连接,从而实现刀具的6个自由度运动。待加工零件固定在机床的工作台上,在整个加工过程中不作任何运动.
ABSTRACT
This design is made up of 6telescopic rod is connected with a fixing platform ( machine frame ) and a moving platform ( spindle ), the machine on 6 sides of the frame is fixed platform,6 telescopic rod through a hinge at a 60 degree angle distribution in the frame, the support rod is fixed, and the rod of are variable in length, can be telescopic. 6 telescopic rod at the other end, through a hinge and a spindle of moving platform is connected, so as to realize the tool with 6degrees of freedom of motion. Parts to be processed is fixed on a working table of a machine tool, in the entire process without any mov
完成日期: 2012-5-30
目 录
摘要 3
ABSTRACT 4
第1章 绪论 5
1.1 课题背景与意义 5
1.2 并联机床发展历史及现状 6
1.2.1 并联机床组成原理的研究 6
1.2.2 并联机床运动空间的研究 7
1.2.3 并联机床结构设计的研究 7
1.2.4 并联机床刚度、精度、柔度、灵巧度的研究 7
1.2.5 并联机床误差研究 7
1.2.6 并联机床模块设计与创建 7
1.2.7 新型虚拟轴数控机床的研究 8
第2章 并联运动机床的设计 9
2.1 机床中的并联机构 9
2.2杆件的配置 13
2.3主轴部件 13
2.4驱动装置的设计 13
2.5机床框架和床身的设计 14
第3章 部件的设计和选用 16
3.1 主轴系统 16
3.1.1 变频电主轴 16
3.1.2刀具夹紧机构 18
3.2杆件和铰链 18
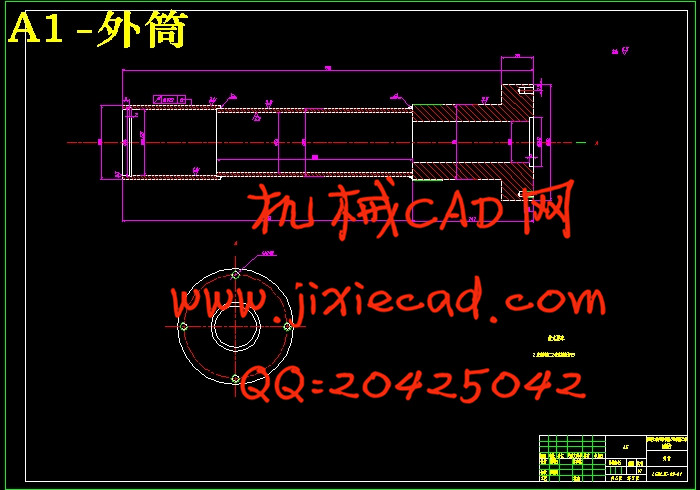
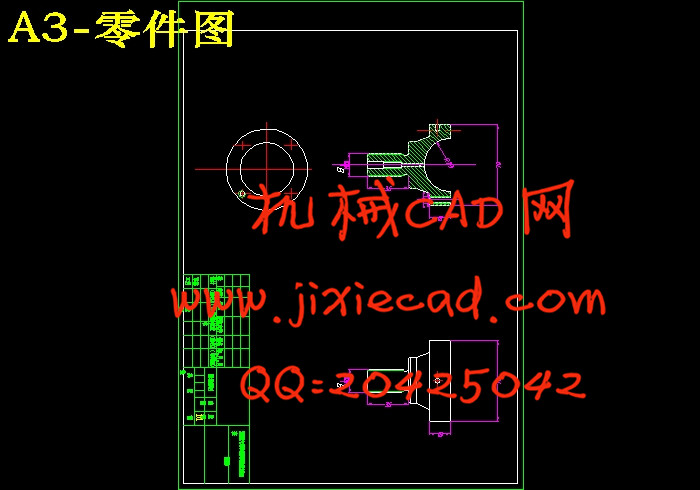
3.2.1杆件设计 18
3.2.2铰链设计 21
3.3伺服电机的选用 22
3.3.1直流伺服电机的选择与计算 22
3.3.2直流伺服电机的控制 25
第4章 滚珠丝杠的计算 26
4.1 参数拟订 26
4.2 稳定性验算 27
4.3 刚度验算 27
4.4 效率验算 28
第5章 并联机床面临的主要技术问题 29
5.2机床的有效工作空间问题 30
结 论 31
致谢 32
参考文献 33