设计简介
摘 要
高楼玻璃幕墙清洗机器人是特种机器人的一个分支。它是基于壁面移动机器
人技术,并针对具体的作业对象,具有明确功能的实用机器人,其工作在垂直危
险的玻璃壁面,能够克服重力的作用,携带清洗设备,是面向现代高层建筑玻璃
外墙表面保洁、清洗服务的极限作业机器人。
论文首先对机器人总体方案进行介绍,在此基础上,对机器人总体结构进行了设计分析。其次重点介绍了机器人的驱动机构,讨论了机器人的作业路径及运动控制规划。最后,简单介绍了机器人的擦洗机构
关键词:玻璃,幕墙清洗机器人,驱动机构,擦洗机构,密封机构
ABSTRACT
Glass-wall cleaning robot is one of robot for limited operation,which can walk on Vertical glass-wall with washing devices.It is a robot with specific applied functions,Based on wall-climbing robot techniques.for specific objects.And it works on vertical Glass-wall,where is dangerous for human beings.It is a robot could conquer the gravity effect and carry cleaning equipments,facing to glass-wall surface beautifying service of modern high-rise buildings.
Firstly, the whole frame of the glass wall cleaning robot is introduced, based on this, the designing and analyzing Of the structure of the robot are described in details.Then,introducing the drive mechanism of the robot,Discussed the operation of the robot path planning and motion control. Finally, a brief introduction of the robot body scrub
Key words: Glass, wall cleaning robot, driving mechanism
Scrub mechanism,sealing mechanism
目 录
摘 要 2
ABSTRACT 2
1 前 言 4
2 玻璃清洁机器人总体方案规划 5
2.1 机器人设计思想 5
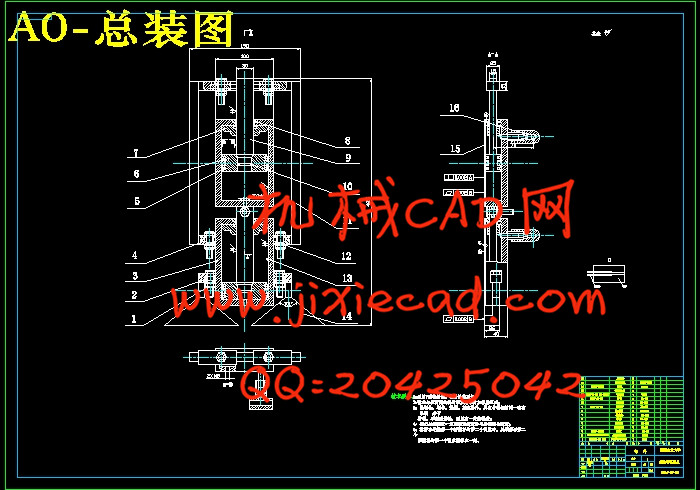
2.2机器人总体结构方案 5
3 驱动机构和擦洗机构 7
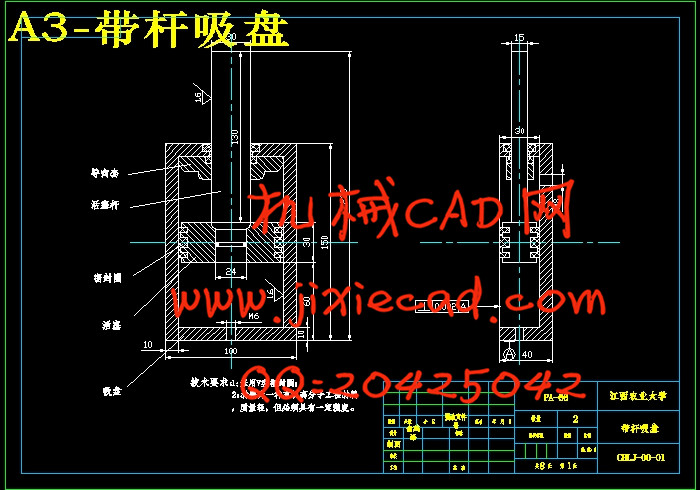
3.1 驱动机构分析 7
3.1.1 驱动方式 7
3.1.2运动结构和运动规划 7
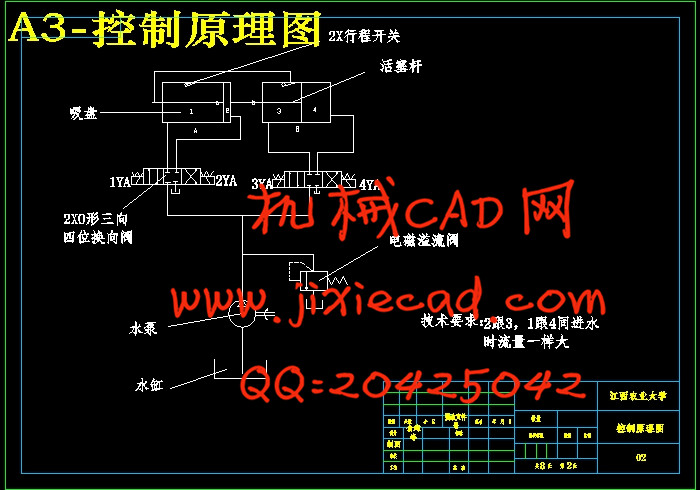
3.1.3运动过程控制原理分析 8
3.1.4外形尺寸选择 10
3.1.5驱动力分析 10
3.1.6小结 11
3.2擦洗机构分析 11
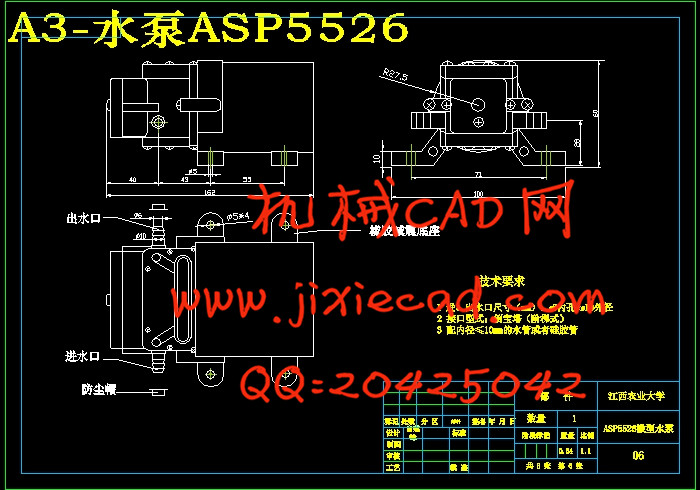
4 其它元件选择 12
4.1密封机构 12
4.2换向阀和溢流阀的选择 12
5 总 结 13
参考文献 14
致 谢 15
高楼玻璃幕墙清洗机器人是特种机器人的一个分支。它是基于壁面移动机器
人技术,并针对具体的作业对象,具有明确功能的实用机器人,其工作在垂直危
险的玻璃壁面,能够克服重力的作用,携带清洗设备,是面向现代高层建筑玻璃
外墙表面保洁、清洗服务的极限作业机器人。
论文首先对机器人总体方案进行介绍,在此基础上,对机器人总体结构进行了设计分析。其次重点介绍了机器人的驱动机构,讨论了机器人的作业路径及运动控制规划。最后,简单介绍了机器人的擦洗机构
关键词:玻璃,幕墙清洗机器人,驱动机构,擦洗机构,密封机构
ABSTRACT
Glass-wall cleaning robot is one of robot for limited operation,which can walk on Vertical glass-wall with washing devices.It is a robot with specific applied functions,Based on wall-climbing robot techniques.for specific objects.And it works on vertical Glass-wall,where is dangerous for human beings.It is a robot could conquer the gravity effect and carry cleaning equipments,facing to glass-wall surface beautifying service of modern high-rise buildings.
Firstly, the whole frame of the glass wall cleaning robot is introduced, based on this, the designing and analyzing Of the structure of the robot are described in details.Then,introducing the drive mechanism of the robot,Discussed the operation of the robot path planning and motion control. Finally, a brief introduction of the robot body scrub
Key words: Glass, wall cleaning robot, driving mechanism
Scrub mechanism,sealing mechanism
目 录
摘 要 2
ABSTRACT 2
1 前 言 4
2 玻璃清洁机器人总体方案规划 5
2.1 机器人设计思想 5
2.2机器人总体结构方案 5
3 驱动机构和擦洗机构 7
3.1 驱动机构分析 7
3.1.1 驱动方式 7
3.1.2运动结构和运动规划 7
3.1.3运动过程控制原理分析 8
3.1.4外形尺寸选择 10
3.1.5驱动力分析 10
3.1.6小结 11
3.2擦洗机构分析 11
4 其它元件选择 12
4.1密封机构 12
4.2换向阀和溢流阀的选择 12
5 总 结 13
参考文献 14
致 谢 15