设计简介
摘 要
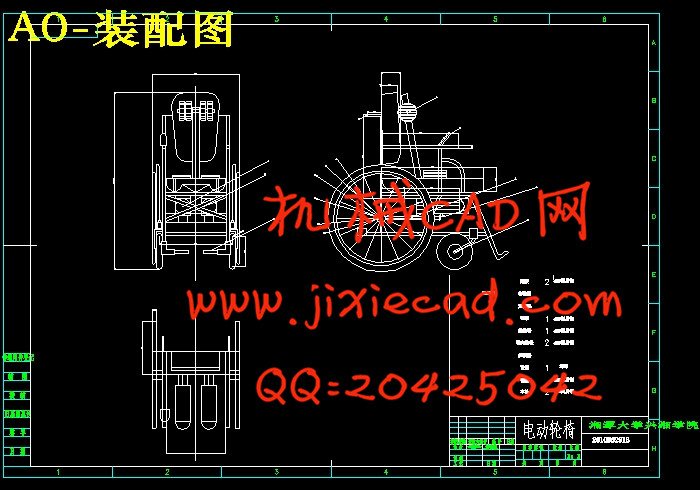
轮椅是年老体弱者以及下肢伤残者必不可少的代步工具,但障碍物却使轮椅受到很大限制。现代由于采用了传统的轮式结构,只能够在平地上行走,面对台阶、楼梯这样比较复杂的地形却显得无能为力。电动性轮椅设计是采用轮腿式机器人结构,正常行驶时轮式工作,采用四轮驱动;遇到障碍时腿式工作,从而适应大多数地形;车身则采用自动导轨式调平结构,该结构简单,调节方便。本次设计的主要工作包括:确定轮椅的工作方式以及工作结构形式、主体尺寸,并确定各主要零、部件的结构尺寸及其选型。
关键词:轮椅 电动轮椅 轮腿式机器人
Abstract
Wheelchairs are frail elderly and the disabled limb indispensable means of transport, but the obstacles while filling the wheelchair is very restricted. As with a traditional modern wheeled structure, can only walk on flat ground, facing steps, stairs, but this is more complex terrain powerless. High-pass design is the use of a wheelchair wheel legged robot structure, normal driving wheel work, the use of four-wheel drive; encounter obstacles leg work to accommodate most of the terrain; body is leveling automatic slide-type structure, the structure is simple, easy to adjust. The design of the main tasks include: determining wheelchair work and the working structure, body size, and identify the major components and parts of the structure size and selection.
Keywords: wheelchair high adoption round legged robot
目 录
摘要 ...................................................................................................................... 1
1 引言 ................................................................................................. 2
1.1 国内外发展情况 ............................................................................................. 4
1.2 设计内容 .....................................................................................................5
1.3 设计思路 ....................................................................................................5
2 系统方案 ....................................................................................................8
2.1 机械系统方案 ............................................................................................8
2.2 控制方案 ............................................................................................10
2.3 总体方案 .....................................................................................11
3 机械结构计 .........................................................................................12
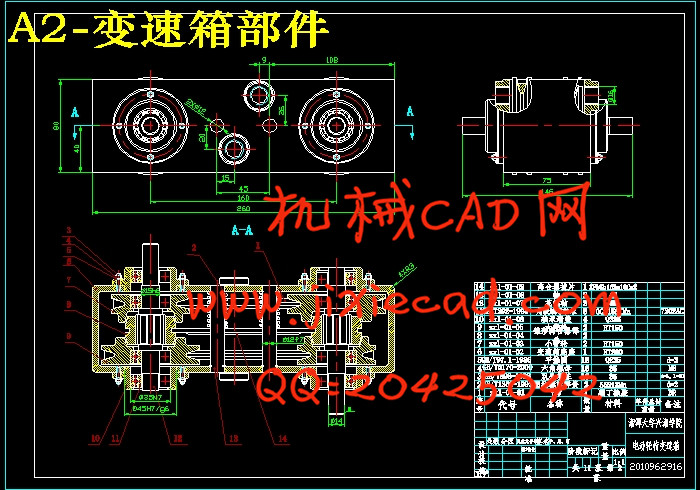
3.1 链条的传动设计 ..................................................................................12
3.2 电动机的选用 ............................................................................12
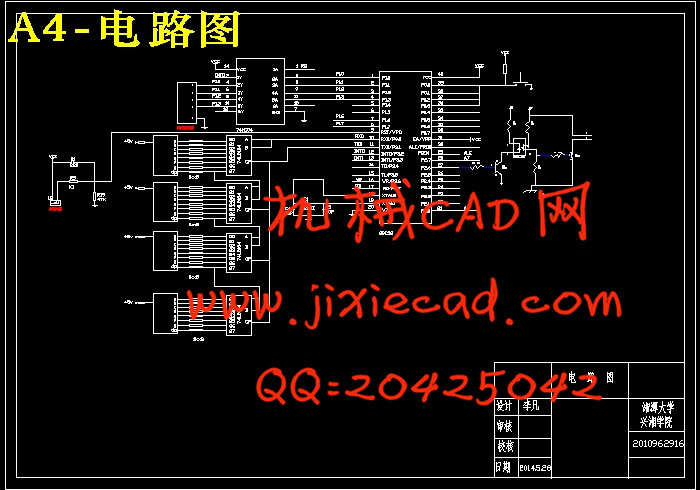
3.3 驱动电路设计 ......................................................................................13
4 控制系统设计 ...........................................................................................14
4.1 控制系统软件设计 ..............................................................................14
5 总 结 ............................................................................................15
5.1 设计总结 .................................................................................... 15
参考文献 ............................................................................................... 16
致谢 ................................................................................................................... 17
轮椅是年老体弱者以及下肢伤残者必不可少的代步工具,但障碍物却使轮椅受到很大限制。现代由于采用了传统的轮式结构,只能够在平地上行走,面对台阶、楼梯这样比较复杂的地形却显得无能为力。电动性轮椅设计是采用轮腿式机器人结构,正常行驶时轮式工作,采用四轮驱动;遇到障碍时腿式工作,从而适应大多数地形;车身则采用自动导轨式调平结构,该结构简单,调节方便。本次设计的主要工作包括:确定轮椅的工作方式以及工作结构形式、主体尺寸,并确定各主要零、部件的结构尺寸及其选型。
关键词:轮椅 电动轮椅 轮腿式机器人
Abstract
Wheelchairs are frail elderly and the disabled limb indispensable means of transport, but the obstacles while filling the wheelchair is very restricted. As with a traditional modern wheeled structure, can only walk on flat ground, facing steps, stairs, but this is more complex terrain powerless. High-pass design is the use of a wheelchair wheel legged robot structure, normal driving wheel work, the use of four-wheel drive; encounter obstacles leg work to accommodate most of the terrain; body is leveling automatic slide-type structure, the structure is simple, easy to adjust. The design of the main tasks include: determining wheelchair work and the working structure, body size, and identify the major components and parts of the structure size and selection.
Keywords: wheelchair high adoption round legged robot
目 录
摘要 ...................................................................................................................... 1
1 引言 ................................................................................................. 2
1.1 国内外发展情况 ............................................................................................. 4
1.2 设计内容 .....................................................................................................5
1.3 设计思路 ....................................................................................................5
2 系统方案 ....................................................................................................8
2.1 机械系统方案 ............................................................................................8
2.2 控制方案 ............................................................................................10
2.3 总体方案 .....................................................................................11
3 机械结构计 .........................................................................................12
3.1 链条的传动设计 ..................................................................................12
3.2 电动机的选用 ............................................................................12
3.3 驱动电路设计 ......................................................................................13
4 控制系统设计 ...........................................................................................14
4.1 控制系统软件设计 ..............................................................................14
5 总 结 ............................................................................................15
5.1 设计总结 .................................................................................... 15
参考文献 ............................................................................................... 16
致谢 ................................................................................................................... 17