设计简介
冲压机械手—升降部分机械结构设计
摘要
机械手是近几十年发展起来的一种高科技自动化生产设备。通过编程来完成各种动作,它的准确性和多自由度,保证了机械手能在各种不同的环境中工作。机械手在工业生产中应用较多,机械手的使用能够显著提高生产效率,减少人为因素造成的废次品率。机械手可以完成很多工作,它在自动化车间中用来运送物料,从事多种工艺操作。它的特点是通过编程来完成各种预期的作业,在构造和性能上兼有人和机器人的部分优点,尤其体现了人的灵活协调和机器人的精确到位。
机械手是在机械自动化生产中逐步发展出的一种新型装置。现代生产过程中机械手被广泛的应用到自动生产线中。机械手目前虽然不如人手的灵活多变,但它具有重复性,无疲劳,不惧危险,有大的抓举力量,因此越来越多的被广泛运用。
机械手技术涉及机械学、力学、自动控制技术、传感技术、电气液压技术,计算机可编程技术等,是一门跨学科综合技术。机械手的运动包括升降、回转、伸缩、夹持等动作。
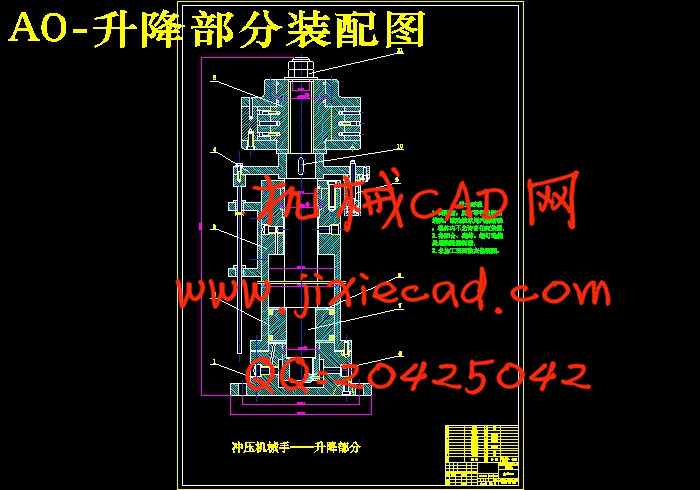
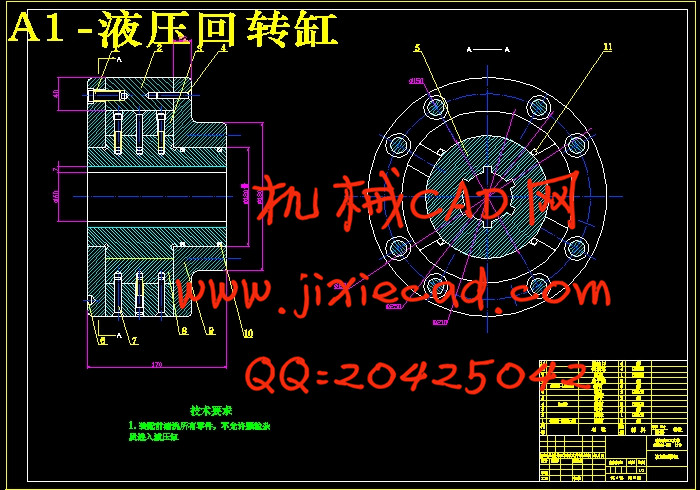
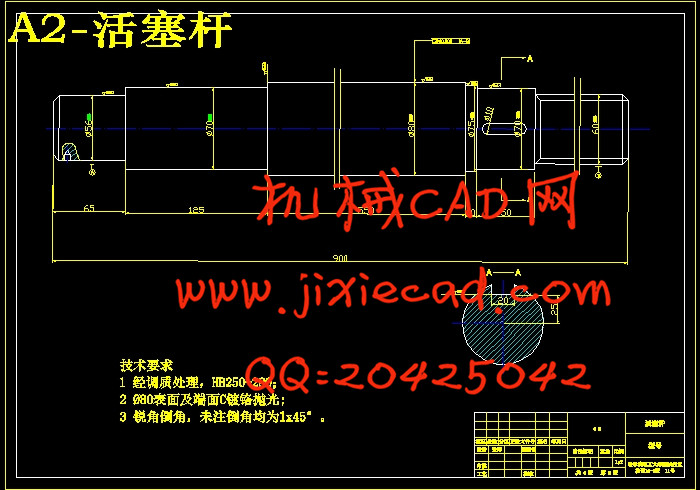
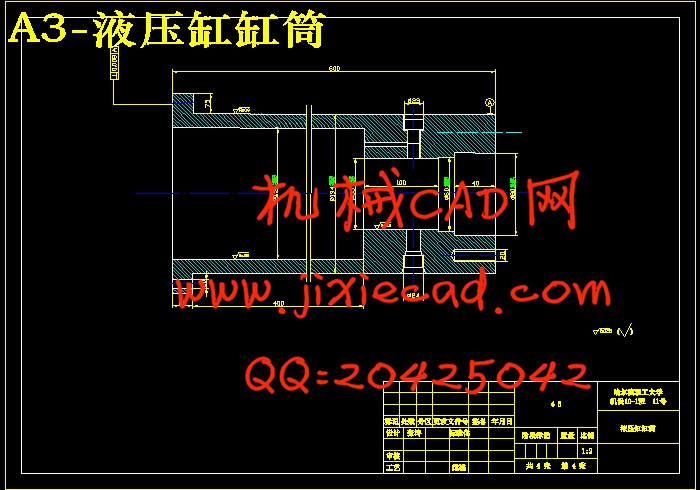
本课题主要设计机械手升降部分的机械结构,包括机械手的升降和回转液压缸的结构设计。
关键词 数控;自动装卸;机械手;PLC
目录
摘要 I
第1章 绪论 - 1 -
1.1 课题背景 - 1 -
1.2 机械手的发展 - 2 -
1.3 工业机械手的分类 - 2 -
1.4 课题设计的目的及意义 - 4 -
第2章 机械手的概述 - 5 -
2.1 机械手的组成 - 5 -
2.2 机械手的主要参数 - 6 -
2.3 应用机械手的意义 - 6 -
2.4 机械手功能图示 - 7 -
第3章 任务分析 - 8 -
3.1 动作分析 - 8 -
3.2 动作节拍 - 8 -
3.3 总体方案 - 8 -
3.4 方案比较 - 8 -
第4章 总体设计 - 9 -
4.1 总体设计的思路 - 9 -
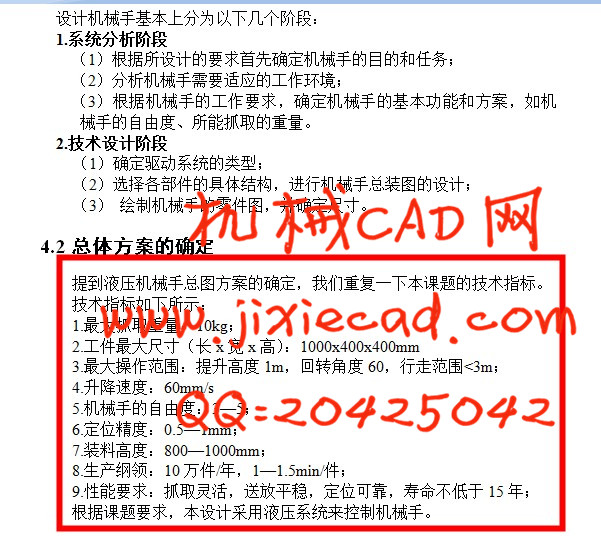
4.2 总体方案的确定 - 9 -
4.3 主要研究目标 - 9 -
第5章 部件设计 - 10 -
5.1 升降部分的驱动设计 - 10 -
5.2 升降部分的结构设计 - 11 -
5.3 回转部分的结构设计 - 13 -
第6章 零件设计 - 16 -
6.1 手臂液压缸螺钉的校核 - 16 -
6.2 手臂升降液压缸筒的壁厚校核 - 17 -
结论 - 18 -
参考文献 - 19 -
致谢 - 20 -
摘要
机械手是近几十年发展起来的一种高科技自动化生产设备。通过编程来完成各种动作,它的准确性和多自由度,保证了机械手能在各种不同的环境中工作。机械手在工业生产中应用较多,机械手的使用能够显著提高生产效率,减少人为因素造成的废次品率。机械手可以完成很多工作,它在自动化车间中用来运送物料,从事多种工艺操作。它的特点是通过编程来完成各种预期的作业,在构造和性能上兼有人和机器人的部分优点,尤其体现了人的灵活协调和机器人的精确到位。
机械手是在机械自动化生产中逐步发展出的一种新型装置。现代生产过程中机械手被广泛的应用到自动生产线中。机械手目前虽然不如人手的灵活多变,但它具有重复性,无疲劳,不惧危险,有大的抓举力量,因此越来越多的被广泛运用。
机械手技术涉及机械学、力学、自动控制技术、传感技术、电气液压技术,计算机可编程技术等,是一门跨学科综合技术。机械手的运动包括升降、回转、伸缩、夹持等动作。
本课题主要设计机械手升降部分的机械结构,包括机械手的升降和回转液压缸的结构设计。
关键词 数控;自动装卸;机械手;PLC
目录
摘要 I
第1章 绪论 - 1 -
1.1 课题背景 - 1 -
1.2 机械手的发展 - 2 -
1.3 工业机械手的分类 - 2 -
1.4 课题设计的目的及意义 - 4 -
第2章 机械手的概述 - 5 -
2.1 机械手的组成 - 5 -
2.2 机械手的主要参数 - 6 -
2.3 应用机械手的意义 - 6 -
2.4 机械手功能图示 - 7 -
第3章 任务分析 - 8 -
3.1 动作分析 - 8 -
3.2 动作节拍 - 8 -
3.3 总体方案 - 8 -
3.4 方案比较 - 8 -
第4章 总体设计 - 9 -
4.1 总体设计的思路 - 9 -
4.2 总体方案的确定 - 9 -
4.3 主要研究目标 - 9 -
第5章 部件设计 - 10 -
5.1 升降部分的驱动设计 - 10 -
5.2 升降部分的结构设计 - 11 -
5.3 回转部分的结构设计 - 13 -
第6章 零件设计 - 16 -
6.1 手臂液压缸螺钉的校核 - 16 -
6.2 手臂升降液压缸筒的壁厚校核 - 17 -
结论 - 18 -
参考文献 - 19 -
致谢 - 20 -