设计简介
冲压机械手—手臂部分设计
摘要
本文所设计的冲压机械手用于搬运工件,为了增加本机械手的通用性,在结构尽可能紧凑的情况下,最大限度地使工业机械手具有较大的抓取范围。
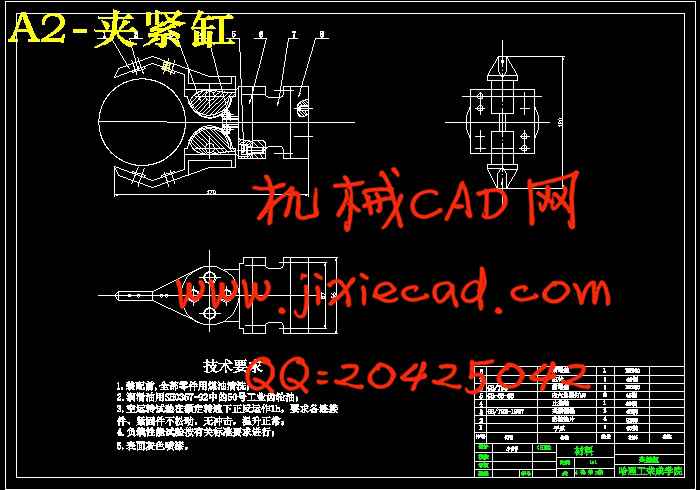
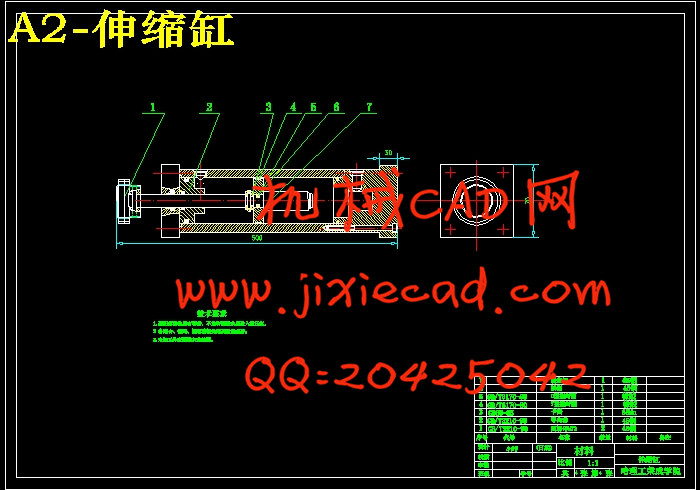
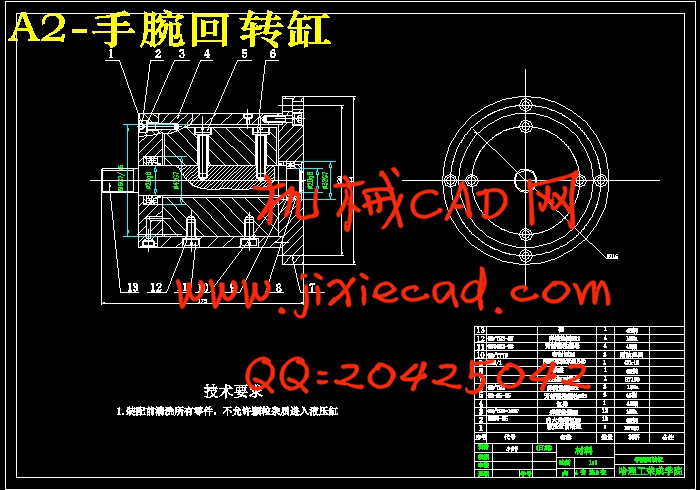
本文主要介绍了冲压机械手的概念、组成和分类,机械手的自由度和坐标形式、运动及国内外的发展状况。对冲压机械手进行总体方案设计,首先确定了机械手的坐标形式为圆柱坐标型,自由度数为5,接着确定了机械手的驱动装置为液压缸,然后确定了机械手的主要技术参数。同时,设计了机械手的手部结构形式为滑槽杠杆式钳爪、手腕的结构形式为采用电机带动腕回转、臂部结构形式采用双导向杆导向,机身结构形式为升降缸置于回转缸之上的结构形式,计算出了夹紧工件所需的驱动力、手腕转动时所需的驱动力矩、手臂伸缩所需的驱动力、手臂俯仰所需的驱动力、手臂升降所需的驱动力和手臂回转所需的驱动力矩。继而设计了冲压机械手的各个部分液压缸的尺寸和结构及各个部分之间连接与支承部件的结构与尺寸。
关键词 液压驱动;冲压机械手;液压缸
目录
摘要…… I摘要
本文所设计的冲压机械手用于搬运工件,为了增加本机械手的通用性,在结构尽可能紧凑的情况下,最大限度地使工业机械手具有较大的抓取范围。
本文主要介绍了冲压机械手的概念、组成和分类,机械手的自由度和坐标形式、运动及国内外的发展状况。对冲压机械手进行总体方案设计,首先确定了机械手的坐标形式为圆柱坐标型,自由度数为5,接着确定了机械手的驱动装置为液压缸,然后确定了机械手的主要技术参数。同时,设计了机械手的手部结构形式为滑槽杠杆式钳爪、手腕的结构形式为采用电机带动腕回转、臂部结构形式采用双导向杆导向,机身结构形式为升降缸置于回转缸之上的结构形式,计算出了夹紧工件所需的驱动力、手腕转动时所需的驱动力矩、手臂伸缩所需的驱动力、手臂俯仰所需的驱动力、手臂升降所需的驱动力和手臂回转所需的驱动力矩。继而设计了冲压机械手的各个部分液压缸的尺寸和结构及各个部分之间连接与支承部件的结构与尺寸。
关键词 液压驱动;冲压机械手;液压缸
目录
第1章 绪论 1
1.1 机械手的含义 1
1.2 机械手的产生、应用与发展 1
1.2.1 机械手的产生(简史) 1
1.2.2 应用简况 2
1.2.3 发展趋势 2
1.3 冲压机械手的组成与运动 3
1.3.1 冲压机械手的组成 3
1.3.2 冲压机械手的运动 5
第2章 冲压机械手的手部设计 10
2.1 概述 10
2.2 手部机构形式 10
2.2.1 手爪 10
2.2.2 传动装置 10
2.2.3 驱动装置 10
2.3 前爪式手部机构的选用要点 11
2.4 滑槽杠杆式钳爪的夹紧力分析与计算 11
2.5 滑槽杠杆式钳爪手部机构的驱动力计算 13
2.6 手部夹紧液压缸的设计与计算 13
2.7 本章小结 14
第3章 冲压机械手的腕部设计 15
3.1 概述 15
3.2 腕部回转力矩的计算 15
3.2.1 摩擦阻力矩
3.2.2 工件重心偏置引起的偏置力矩
3.2.3 腕部启动时的惯性阻力矩
3.3 本章小结 17
第4章 工业机械手臂部的设计 18
4.1 概述 18
4.2 冲压机械手臂部的结构形式 18
4.2.1 冲压机械手臂部伸缩运动的结构 19
4.2.2 冲压机械手臂部俯仰运动的结构 19
4.2.3 冲压机械手臂部回转及升降的结构 20
4.2.4 导向装置 20
4.3 冲压机械手臂部运动驱动液压缸的设计与计算 21
4.3.1 手臂水平伸缩运动驱动液压缸的计算 21
4.3.2 手臂垂直升降运动驱动液压缸的设计与计算 22
4.4 冲压机械手的液压缓冲装置 23
4.5 本章小结 24
结论 25
致谢 26
参考文献 27