设计简介
摘要
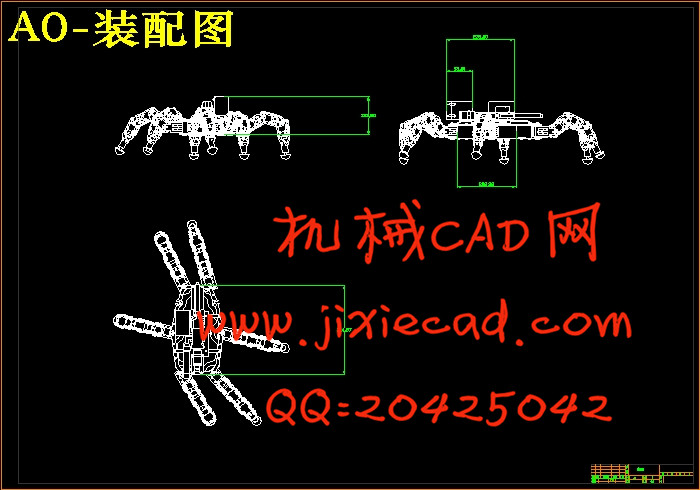
本文以完成六足行走机器人的机械机构和控制系统为主要目标,对六足行走机器人的控制系统进行研究。本文需要解决的问题:一是机器人的机械结构、控制结构,二是多关节分级控制和相应的编程部分。具体的内容包括:根据六足行走机器人对控制系统的要求分析了六足行走机器人的机构以及运动特点。确定了分级控制结构的硬件配置和下位机结构的软件设计,控制器选用合理,采用插补算法规划路径,即先规划脉冲总数最大的关节,后按比例插补其他关节,分析了伺服系统的多关节控制原理,并选用OWL编程。采集和处理来自传感器的信息,得到关节转角和着地状态。最后从实验的角度研究和分析行走速度并分析误差。有助于进一步完成六足行走机器人的制作和控制。
关键词:六足行走机器人;多关节控制;分级控制结构;OWL编程
本文以完成六足行走机器人的机械机构和控制系统为主要目标,对六足行走机器人的控制系统进行研究。本文需要解决的问题:一是机器人的机械结构、控制结构,二是多关节分级控制和相应的编程部分。具体的内容包括:根据六足行走机器人对控制系统的要求分析了六足行走机器人的机构以及运动特点。确定了分级控制结构的硬件配置和下位机结构的软件设计,控制器选用合理,采用插补算法规划路径,即先规划脉冲总数最大的关节,后按比例插补其他关节,分析了伺服系统的多关节控制原理,并选用OWL编程。采集和处理来自传感器的信息,得到关节转角和着地状态。最后从实验的角度研究和分析行走速度并分析误差。有助于进一步完成六足行走机器人的制作和控制。
关键词:六足行走机器人;多关节控制;分级控制结构;OWL编程
ABSTRACT
This paper aims to study the control system of six-legged walking robot in order to make six foot walking robot. The problem of this paper is the mechanical structure and control structure of the robot, the multi-joint classification control and the corresponding programming part. The specific content includes: the six foot walking robot's requirements for the control system analyzed the mechanism of the six-legged robot and its characteristics. Determine the hierarchical control structure of the hardware configuration and the structure of the software of singlechip processor design, choose reasonable controller, path planning based on the interpolation algorithm, namely the first program pulse's largest total joint, a proportional interpolation after other joints, control principle of multi-joint servo system are analyzed, and selects the OWL programming. Collect and process information from the sensor, and obtain the Angle and landing condition of the joint. Finally, the walking speed and analysis error were analyzed from the experimental Angle. These are the basis for the production and control of the six-legged robot.
Key Words:The six-legged robot; Multi-joint ;Control structure ;OWL programming
This paper aims to study the control system of six-legged walking robot in order to make six foot walking robot. The problem of this paper is the mechanical structure and control structure of the robot, the multi-joint classification control and the corresponding programming part. The specific content includes: the six foot walking robot's requirements for the control system analyzed the mechanism of the six-legged robot and its characteristics. Determine the hierarchical control structure of the hardware configuration and the structure of the software of singlechip processor design, choose reasonable controller, path planning based on the interpolation algorithm, namely the first program pulse's largest total joint, a proportional interpolation after other joints, control principle of multi-joint servo system are analyzed, and selects the OWL programming. Collect and process information from the sensor, and obtain the Angle and landing condition of the joint. Finally, the walking speed and analysis error were analyzed from the experimental Angle. These are the basis for the production and control of the six-legged robot.
Key Words:The six-legged robot; Multi-joint ;Control structure ;OWL programming
目录
摘要 I
ABSTRACT II
1.绪论 1
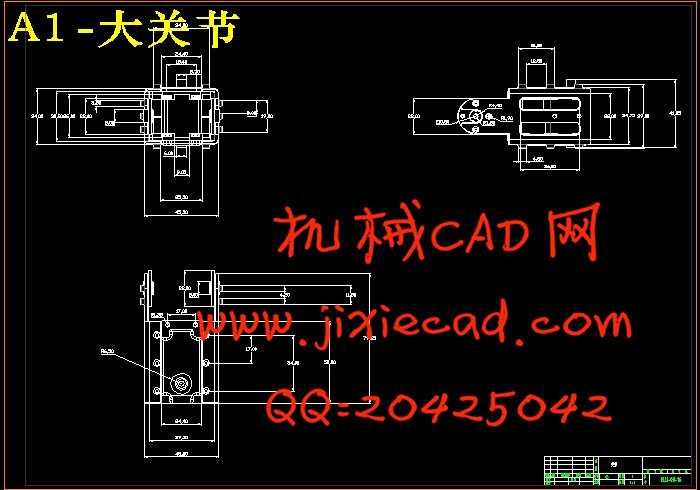
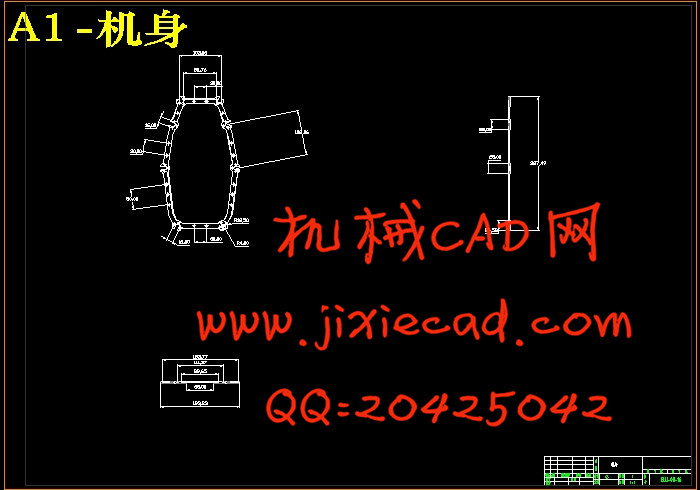
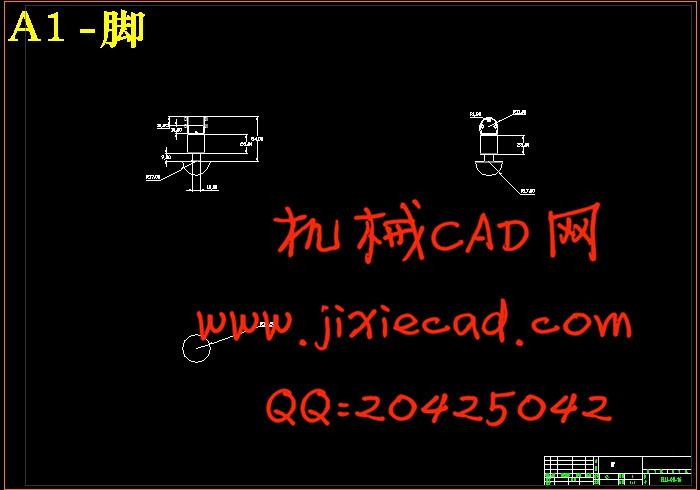
2.六足机器人结构 4
2.1机器人的机构以及运动特点 4
2.2 机器人对控制系统的要求 4
2.4机器人控制系统的结构 8
2.5小结 10
3.多关节控制 11
3.1控制原理 11
3. 2 OWL编程 12
4.编程部分 13
4. 1 语言 13
4. 2工艺组合 13
4. 3序列 13
4.4参数传递 13
4.5示例 15
4.6小结 17
5.机器人速度实验研究 18
5.1速度的实验和误差分析 18
5.2 速度的因素分析和改进方法 18
5.3 小结 18
5.结论 20
致谢 22