设计简介
摘 要
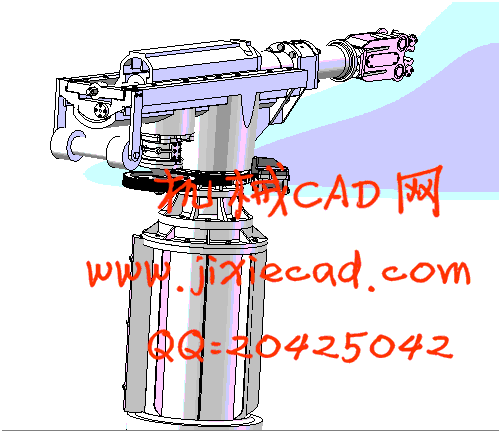
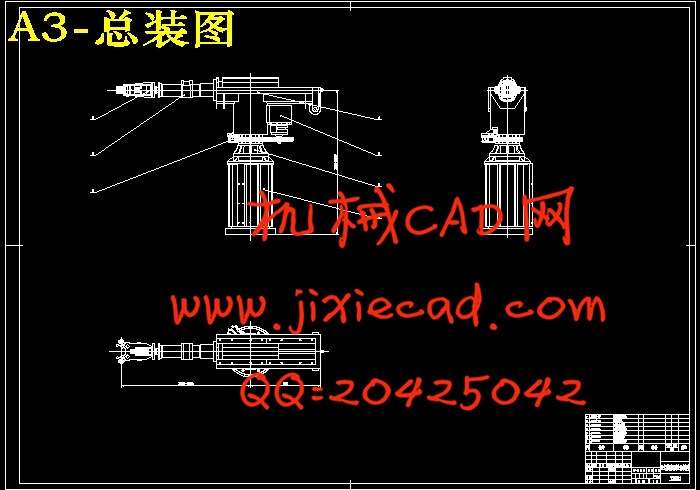
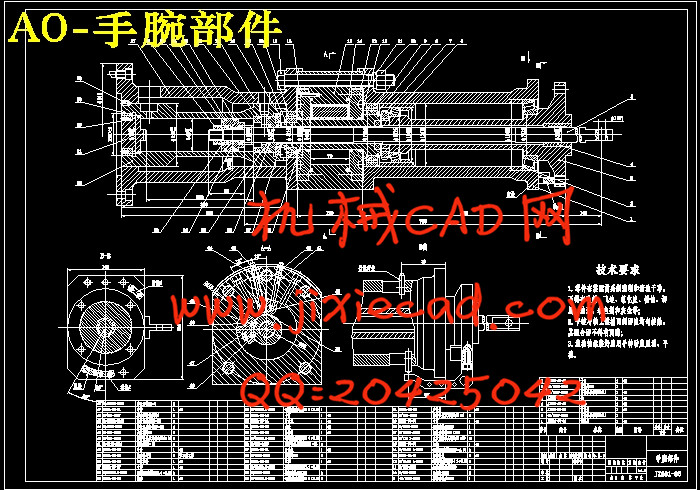
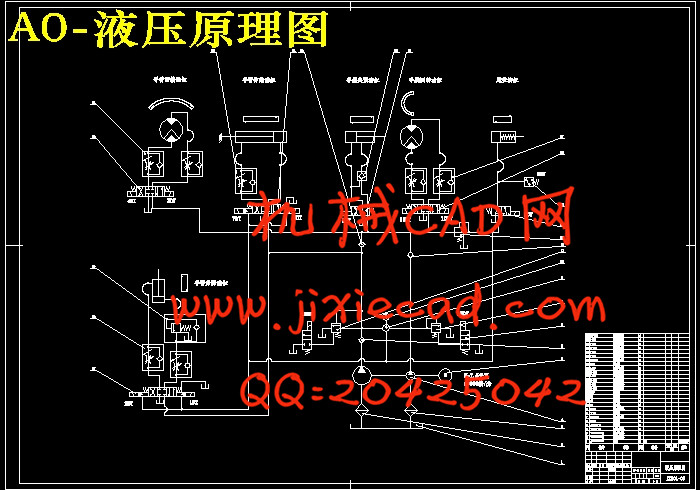
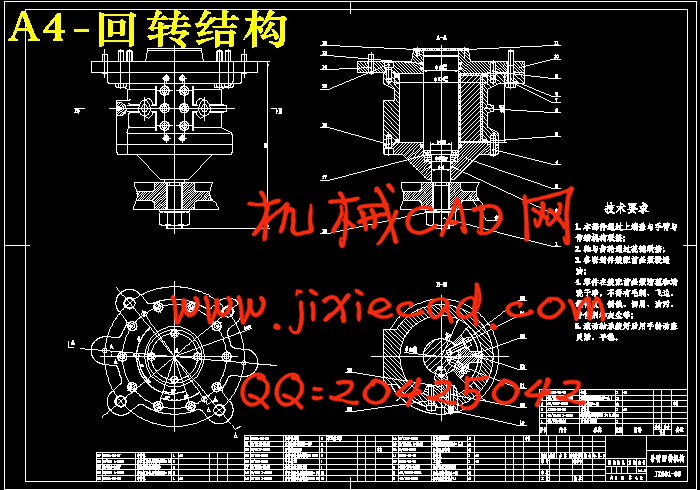
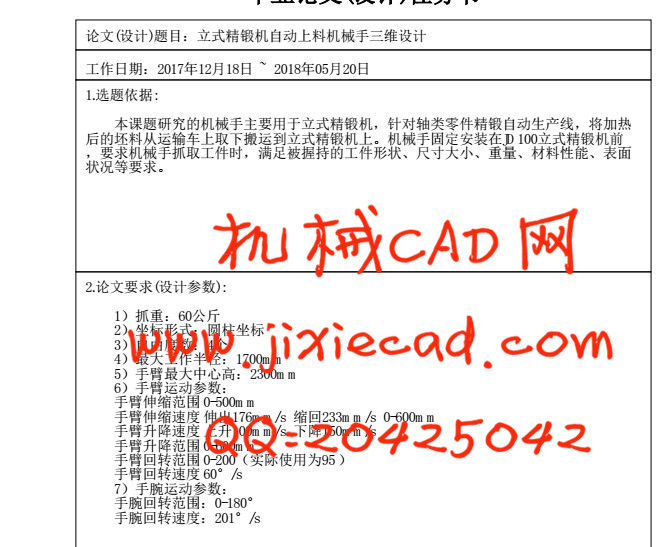
工业机械手在目前的工业趋势下,势必会变得越来越受重用。它既拥有着传统机械的作用,也可以通过系统的指令来完成规定的动作。由于工业机械手与人不同,它不需要休息,在适当的维护保养下可以长时间的工作,十分高效,在工业过程中展现出强大的生命力。机械手技术包含了软件技术,机械工程,人工智能等多个领域的技术。其应用状况,是一个国家工业自动化的标志。随着当下工业自动化的发展与需求,由此可见,机械手将在工业中扮演着更加重要的角色。为了解决抓取圆形坯料并将其运输到立式精锻机上,设计了立式精锻机自动上料机械手。本文首先简单介绍了机械手的理论意义以及应用价值,表述了机械手的4个自由度和整体坐标形式。在给定了关键参数后,然后再对机械手的整体各结构和机械手结构内的部分重要零件进行详细的分析和选取,并进行一定的载荷的校核。其中选取了圆柱坐标作为其坐标形式,手爪部分选用了双支点回转结构作为夹紧部分;手腕部分采取了回转油缸,以液压驱动的方式进行驱动;手臂部分采取了相同的液压缸结构。并对液压系统进行了一定的分析。
其次,在选取完大致的结构之后,本文也详细介绍了机械手的设计理论和计算方法。详尽的讨论了机械手手爪部、机械手手腕部、机械手手臂升降、伸缩、回转机构的相关计算来确保机械手能够可靠的抓取坯料。
最后,通过Solidworks对机械手整体进行三维建模。
关键词:机械手,液压传动,Solidworks三维建模,立式精锻机
ABSTRACT
Industrial robots will become more and more popular in the current industrial trend. It not only has the function of traditional machinery, but also can complete the prescribed actions through systematic instructions. Because industrial manipulator is different from people, it does not need rest. It can work for a long time with the proper maintenance. It is very efficient and shows great vitality in the process of industry. Manipulator technology includes software technology, mechanical engineering, artificial intelligence and other fields of technology. Its application status is the symbol of a country's industrial automation. With the development and demand of industrial automation, manipulator will act a more important role in industry.In order to solve the grabing round billet and transport it to the vertical precision forging machine.The vertical precision forging machine with automatic feeding manipulator is designed. This paper firstly introduces the theoretical significance and application value of manipulator, and describes the four degrees of freedom and overall coordinate form of manipulator. After the key parameters are given, the whole structure of the manipulator and some important parts in the structure of the manipulator are analyzed and selected in detail, and a certain load check is carried out. The cylindrical coordinate is selected as its coordinate form, and the double pivot structure is used as the clamping part. The wrist part adopts the rotary oil cylinder, which is driven by the hydraulic drive; The arm part adopts the same hydraulic cylinder structure. And the hydraulic system is analyzed.
Secondly, after selecting the general structure, the design theory and calculation method of manipulator are introduced in detail. This paper discusses the calculation of manipulator arm, wrist, arm lifting, stretching and rotating mechanism to ensure the reliable grasping of the blank.
Finally, three-dimensional modeling of the manipulator is carried out through Solidworks.
Key words:Machine Manipulator,Hydraulic transmission, Solidworks 3D modeling,Vertical precision forging machine
目录
摘 要 IABSTRACT II
1 绪论 1
2 机械手方案的选择 3
2.1 机械手坐标形式的确定 3
2.2 机械手的主要部件及运动 3
2.3 驱动机构的选择 4
2.4 机械手参数的确定 4
2.5 本章小结 4
3 机械手手部方案的确定与设计 5
3.1 手部结构分类 5
3.2 夹钳式手部设计的要求 5
3.3 机械手手部的设计 6
3.3.1 手部夹紧装置 6
3.3.2 手爪的力学分析 6
3.3.3 夹紧力及驱动力的计算 7
3.4 夹紧缸尺寸计算 9
3.5 螺栓尺寸的选定 10
3.5.1 手指部螺栓的分析与计算 10
3.5.2 手架部分螺栓的分析与计算 11
3.6 手部拉紧轴的分析 11
3.6.1 轴的载荷分析和计算 11
3.6.2轴的材料的选择 12
3.7 销连接的设计 12
3.8 本章小结 12
4 机械手手腕结构设计 13
4.1 腕部设计所需满足的要求 13
4.2 腕部结构的选择 13
4.3 腕部的设计计算 13
4.3.1 腕部参数的设定 14
4.3.2 腕部驱动条件的确定 14
4.4 腕部零件的设计 16
4.4.1 腕部轴承的设计 16
4.4.2腕部键的设计 16
4.5 本章小结 17
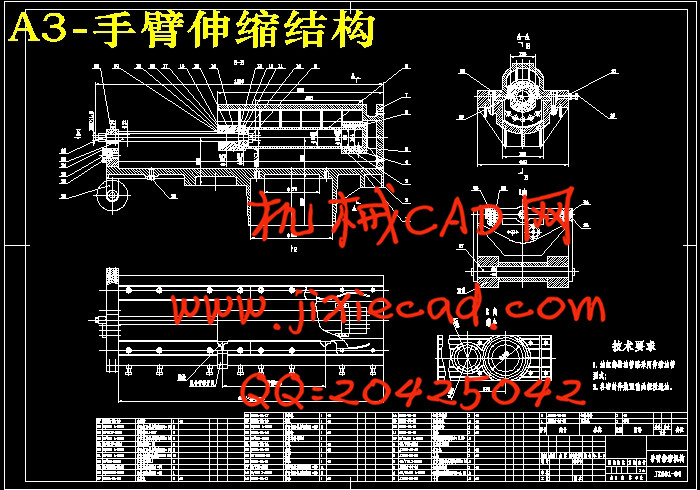
5 机械手手臂方案的确定与设计 18
5.1 满足手臂运动的要求 18
5.2 机构的选择 18
5.3 手臂的设计计算 18
5.3.1 系统摩擦力的计算 19
5.3.2 手臂密封装置阻力的分析与计算 19
5.3.3 惯性力的计算 19
5.4 液压缸压力和结构的分析 20
5.5 手臂部分螺栓的设计 21
5.6 手臂部分的装配以及技术要求 21
5.7 本章小结 21
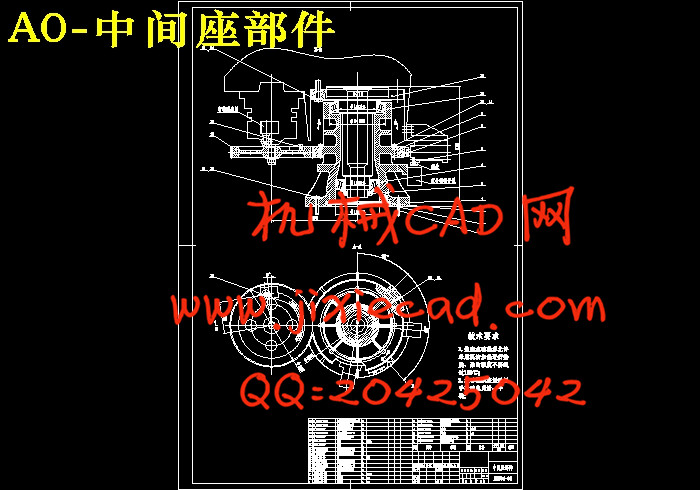
6 机械手机身结构设计 22
6.1 机身整体构思 22
6.2 机身回转机构的分析与计算 22
6.2.1 液压缸驱动力矩的计算 22
6.2.2 回转缸尺寸的选定 24
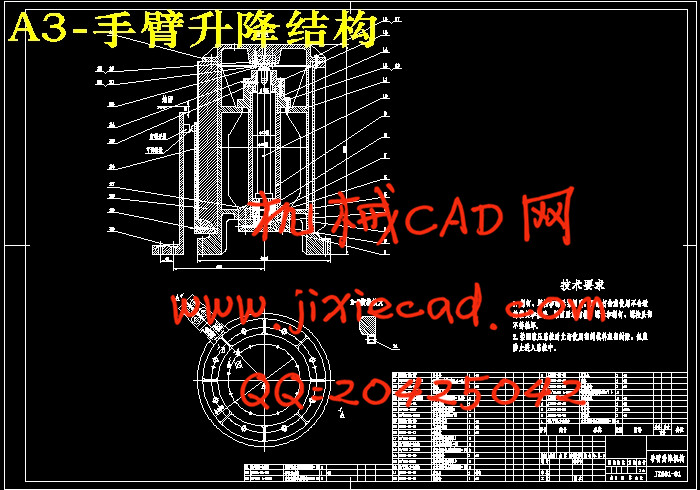
6.3 机身升降机构的计算 24
6.3.1 手臂偏重力矩的计算 24
6.3.2 手臂升降不自锁条件分析计算 25
6.3.3 手臂升降时驱动力的计算 25
6.3.4 液压缸尺寸的初步确定 26
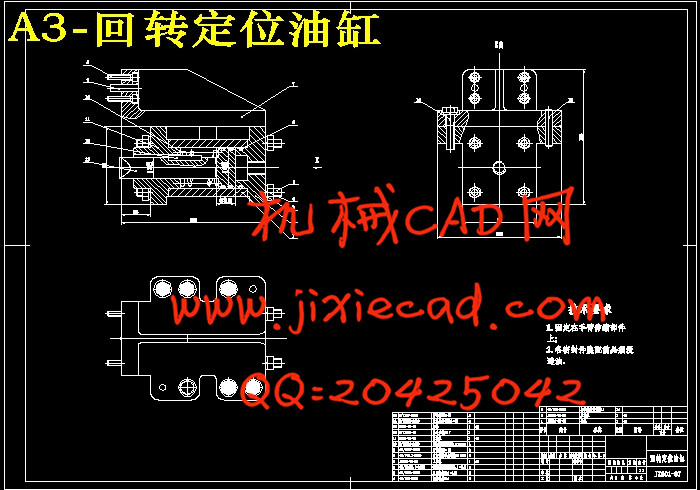
6.4 回转液压缸结构确定 27
6.4.1 定位杆的受力分析 27
6.4.2 定位缸的设计计算 27
6.5 齿轮的计算 28
6.6 连接件的设计 29
6.6.1 回转定位油缸键的选取 29
6.6.2 回转定位油缸销的选取 29
6.7 本章小结 29
7 机械手零部件三维建模 30
7.1 SolidWorks软件的背景及特点 30
7.2 机械手的三维建模 30
7.3 本章小结 32
8 经济性与环保性分析 33
8.1尽量使用环保无污染材料 33
8.2系统高效节能设计 33
8.3本章小结 33
9 液压系统 34
10结论与展望 36
参考文献 37
致谢 54