设计简介
摘 要
现代制造业技术的进步,进了冲压生产向高速化、自动化和智能化方向的发展。传统的冲压生产多采用专机操作和人工上下料,而这种生产方式已不能满足日益快速发展的工业要求。如今,在冲压生产中引进自动化生产单元和建立柔性自动化生产线,
不仅可以实现冲压设备的高效、高速化,还可以提高产品加工的质量和精度,同时也开辟了冲压生产技术的一个重要发展方向。冲床机械手是在自动化设备的基础上,专门为实现冲压自动化无人生产而研发的智能设备,它能够间接或直接地代替人工在相关冲压工位上进行物料的取放、搬运和冲压上下料等工作,从而极大地提高生产效率和质量。相比于电机驱动、液压驱动,气压传动与控制的机械手在响应速度以及自动化控制上具有很大的优势。气动技术使用气体为动力传输介质。首先,气源来源广泛,可直接从空气中汲取,廉价便捷。其次,气动传动迅速,稳定可靠,结构简单,质量也较其他机构更轻。在末端执行效果来看,使用气动可使执行机构具有很好的柔性,这样在使用过程中更加的安全,对所工作对象的损伤也较小。另外,由于气体无害,清洁,其在维修、检查等方面都较为方便。
机械技术与电子技术相结合已经成为当前装备制造业的主流和发展趋向,机电一体化是现代化机械和技术的重要特征之一,为适应机电一体化的应用,气压传动与控制技术更应顺应时代的发展。气动机械手的探索创新将是一个很好的拓展方向。
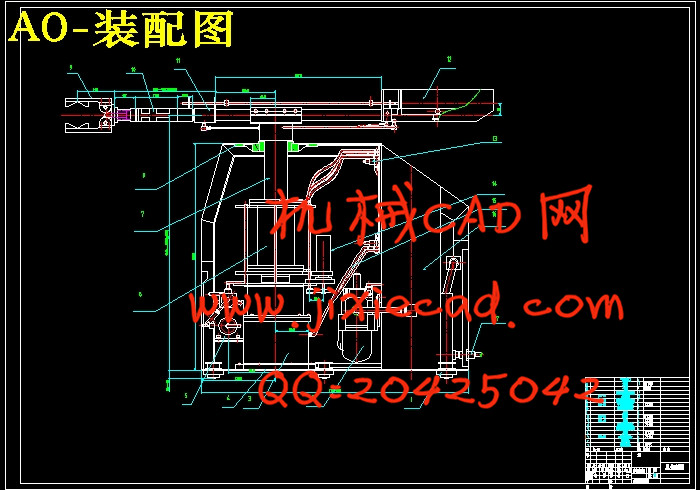
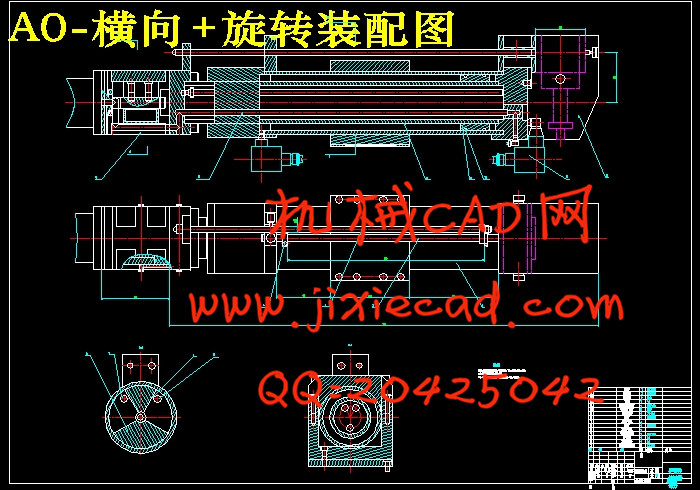
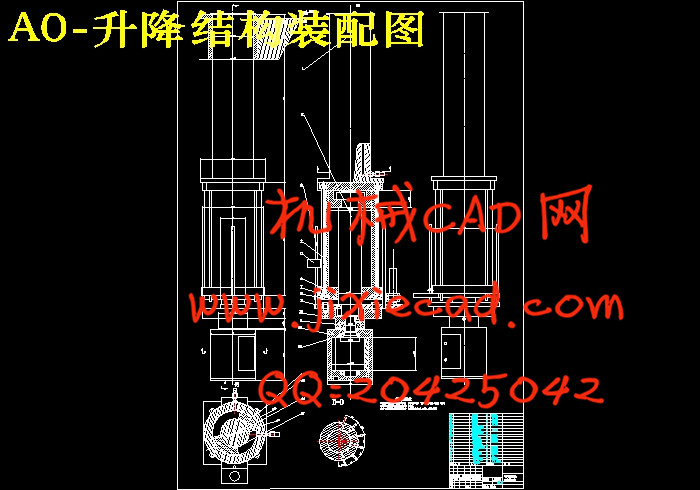
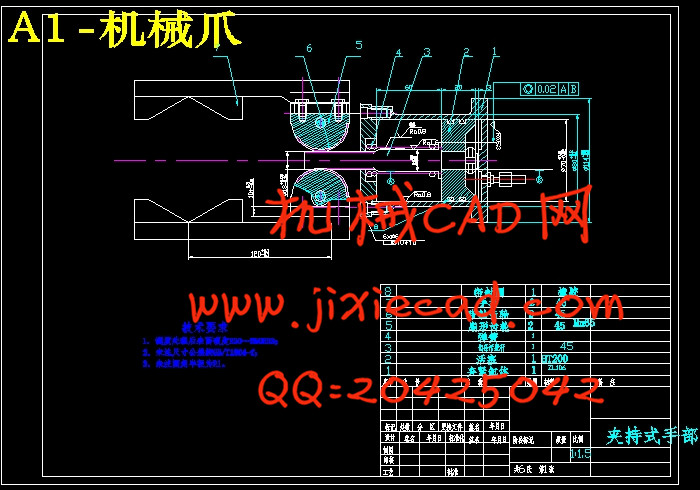
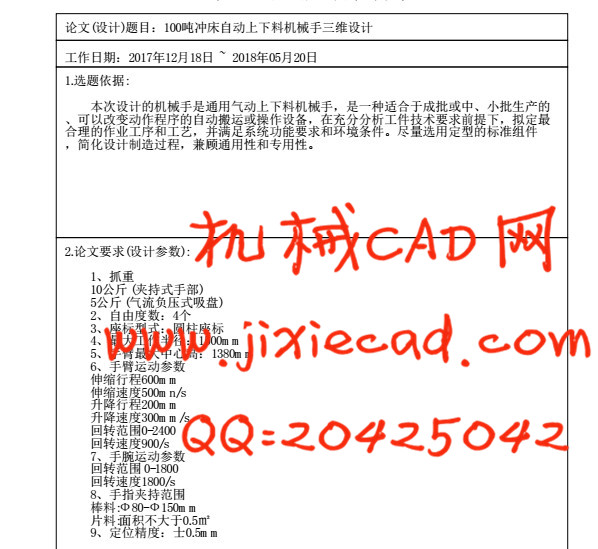
根据 100 吨冲床自动上下料机械手设计要求,对总体方案设计和驱动方式进行对比选优。着重针对机械手末端执行机构,对轴类工件以及薄板工件的抓取方式进行对比选择。对于机械手对工件的搬运、翻面等工序有针对性的采用伸缩气缸以及摆动马达,并对其进行设计计算、校核对于满足设计要求的元件优先采用标准件。在机械手结构设计计算的基础上,用 SolidWorks 软件完成了机械手手腕回转结构、机械手臂伸缩升降结构以及导向机构的三维建模。
关键词:机械手,气压传动,Solidworks 三维建模,冲压。
现代制造业技术的进步,进了冲压生产向高速化、自动化和智能化方向的发展。传统的冲压生产多采用专机操作和人工上下料,而这种生产方式已不能满足日益快速发展的工业要求。如今,在冲压生产中引进自动化生产单元和建立柔性自动化生产线,
不仅可以实现冲压设备的高效、高速化,还可以提高产品加工的质量和精度,同时也开辟了冲压生产技术的一个重要发展方向。冲床机械手是在自动化设备的基础上,专门为实现冲压自动化无人生产而研发的智能设备,它能够间接或直接地代替人工在相关冲压工位上进行物料的取放、搬运和冲压上下料等工作,从而极大地提高生产效率和质量。相比于电机驱动、液压驱动,气压传动与控制的机械手在响应速度以及自动化控制上具有很大的优势。气动技术使用气体为动力传输介质。首先,气源来源广泛,可直接从空气中汲取,廉价便捷。其次,气动传动迅速,稳定可靠,结构简单,质量也较其他机构更轻。在末端执行效果来看,使用气动可使执行机构具有很好的柔性,这样在使用过程中更加的安全,对所工作对象的损伤也较小。另外,由于气体无害,清洁,其在维修、检查等方面都较为方便。
机械技术与电子技术相结合已经成为当前装备制造业的主流和发展趋向,机电一体化是现代化机械和技术的重要特征之一,为适应机电一体化的应用,气压传动与控制技术更应顺应时代的发展。气动机械手的探索创新将是一个很好的拓展方向。
根据 100 吨冲床自动上下料机械手设计要求,对总体方案设计和驱动方式进行对比选优。着重针对机械手末端执行机构,对轴类工件以及薄板工件的抓取方式进行对比选择。对于机械手对工件的搬运、翻面等工序有针对性的采用伸缩气缸以及摆动马达,并对其进行设计计算、校核对于满足设计要求的元件优先采用标准件。在机械手结构设计计算的基础上,用 SolidWorks 软件完成了机械手手腕回转结构、机械手臂伸缩升降结构以及导向机构的三维建模。
关键词:机械手,气压传动,Solidworks 三维建模,冲压。
100 吨冲床自动上下料机械手三维设计
ABSTRACT
The progress of modern manufacturing technology has promoted the development of stamping production in the direction of high speed, automation and intelligence. The traditional stamping production uses the special machine operation and the manual loading and unloading, but this kind of production method cannot meet the increasingly rapid development of the industrial requirements. Nowadays, the introduction of automated production units and the establishment of flexible automated production lines in stamping production can not only achieve high efficiency and high speed of stamping equipment, but also improve the quality and precision of product processing. And at the same time, it also opens up an important development direction of stamping production technology. The punch manipulator is a smart device developed specifically for automation of unpressurized stamping on the basis of automation equipment. It can directly or indirectly replace the manual picking and placing, handling and punching of materials on the relevant stamping stations, so the production efficiency and product quality have been greatly increased. Compared to the motor-driven, hydraulically-driven pneumatic transmission and control manipulators, it has great advantages in response speed and automation control. Pneumatic technology uses gas-powered transmission media. First of all, the source of gas is wide and it can be directly extracted from the air, which is cheap and convenient. Second, pneumatic transmission is rapid, stable, reliable, simple in structure, and lighter in quality than other mechanisms. In the end of the implementation of the effect of view, the use of pneumatic actuators can have a very good flexibility, so that in the use of more secure, less damage to the work of the object. In addition, because the gas is harmless and clean, it is convenient for maintenance, inspection.
The combination of mechanical technology and electronic technology has become the current mainstream and development trend of the equipment industry. Mechanical and electrical integration is one of the important features of modern machinery and technology. In order to adapt to the application of mechatronics, the pneumatic transmission and control technology should adapt to the times. The exploration and innovation of pneumatic robots will be a good development direction.
According to the design requirements, the robot's overall program design and drive methods are compared and selected. Emphasis will be placed on the selection of the gripping method for the shaft-type workpiece and the thin-plate workpiece by the end effector of the robot. For telescopic cylinders and oscillating motors, the manipulator's handling of workpieces, turning and other processes are targeted, and their design calculations and verifications are performed. Components that meet the design requirements are given preference for standard parts. On the basis of calculation and design of manipulator structure, the three-dimensional modeling of manipulator, wrist rotation structure, telescopic lifting structure of manipulator arm and guide mechanism using SolidWorks software was completed.
ABSTRACT
The progress of modern manufacturing technology has promoted the development of stamping production in the direction of high speed, automation and intelligence. The traditional stamping production uses the special machine operation and the manual loading and unloading, but this kind of production method cannot meet the increasingly rapid development of the industrial requirements. Nowadays, the introduction of automated production units and the establishment of flexible automated production lines in stamping production can not only achieve high efficiency and high speed of stamping equipment, but also improve the quality and precision of product processing. And at the same time, it also opens up an important development direction of stamping production technology. The punch manipulator is a smart device developed specifically for automation of unpressurized stamping on the basis of automation equipment. It can directly or indirectly replace the manual picking and placing, handling and punching of materials on the relevant stamping stations, so the production efficiency and product quality have been greatly increased. Compared to the motor-driven, hydraulically-driven pneumatic transmission and control manipulators, it has great advantages in response speed and automation control. Pneumatic technology uses gas-powered transmission media. First of all, the source of gas is wide and it can be directly extracted from the air, which is cheap and convenient. Second, pneumatic transmission is rapid, stable, reliable, simple in structure, and lighter in quality than other mechanisms. In the end of the implementation of the effect of view, the use of pneumatic actuators can have a very good flexibility, so that in the use of more secure, less damage to the work of the object. In addition, because the gas is harmless and clean, it is convenient for maintenance, inspection.
The combination of mechanical technology and electronic technology has become the current mainstream and development trend of the equipment industry. Mechanical and electrical integration is one of the important features of modern machinery and technology. In order to adapt to the application of mechatronics, the pneumatic transmission and control technology should adapt to the times. The exploration and innovation of pneumatic robots will be a good development direction.
According to the design requirements, the robot's overall program design and drive methods are compared and selected. Emphasis will be placed on the selection of the gripping method for the shaft-type workpiece and the thin-plate workpiece by the end effector of the robot. For telescopic cylinders and oscillating motors, the manipulator's handling of workpieces, turning and other processes are targeted, and their design calculations and verifications are performed. Components that meet the design requirements are given preference for standard parts. On the basis of calculation and design of manipulator structure, the three-dimensional modeling of manipulator, wrist rotation structure, telescopic lifting structure of manipulator arm and guide mechanism using SolidWorks software was completed.
Key words:Robot,Pneumatic transmission Solidworks, 3D modeling,Stamping
100 吨冲床自动上下料机械手三维设计
目 录
1. 绪 论 1
1.1 前言 1
1.2 国内工业机械手现状 1
1.3 国外工业机器人现状 2
1.4 项目意义 2
2. 机械手结构设计 4
2.1 机械手基本形式的选择 4
2.2 驱动机构的选择 4
2.3 整体结构的设计 4
3. 手部设计 6
3.1 手部结构分类 6
3.2 夹持式手部设计的基本要求 6
3.3 手部驱动力计算 6
3.4 气缸直径计算 9
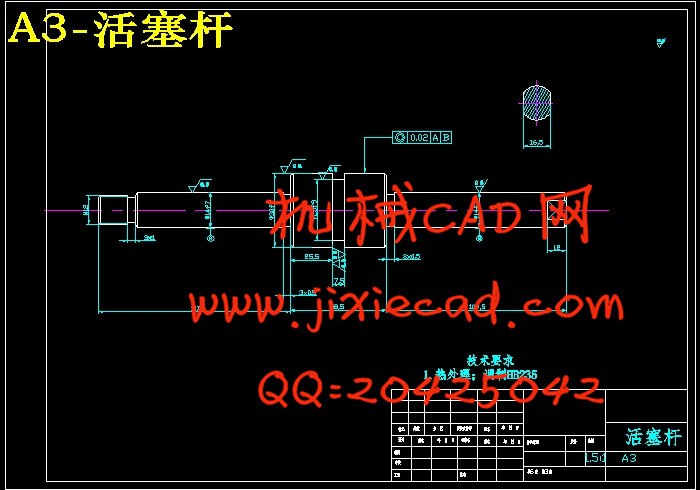
3.5 校核活塞杆强度 11
3.6 活塞杆技术要求 11
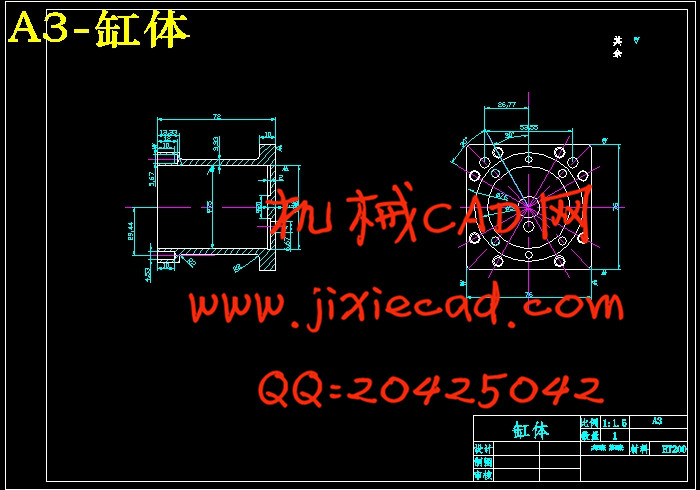
3.7 夹紧气缸缸筒壁的设计计算 11
3.8 气缸技术要求 12
3.9 活塞技术要求 12
3.10 气缸缓冲计算 13
4. 吸盘机械手 15
4.1 吸盘机械手概况 15
4.2 喷气式气流负压式吸盘原理 16
4.3 计算吸盘的直径 17
5. 手腕设计 18
5.1 机械手手腕结构设计 18
5.2 叶片式摆动马达结构原理 18
5.3 手腕摆动气缸的驱动力矩计算 19
5.4 手腕转动所需的实际驱动力 19
6. 手臂设计 22
6.1 机械手臂结构设计 22
6.2 机械手臂伸缩设计 22
6.3 机械臂的导向设计 23
6.4 机械手臂驱动力计算 23
6.5 伸缩气缸校核计算 25
6.6 缸筒壁厚计算 26
6.7 活塞杆直径的计算 26
6.8 机械手臂的升降以及回转结构 27
6.9 伸缩气缸驱动力计算 28
6.10 升降气缸的直径计算 28
6.11 缸筒壁厚计算 30
7. 辅助结构设计 31
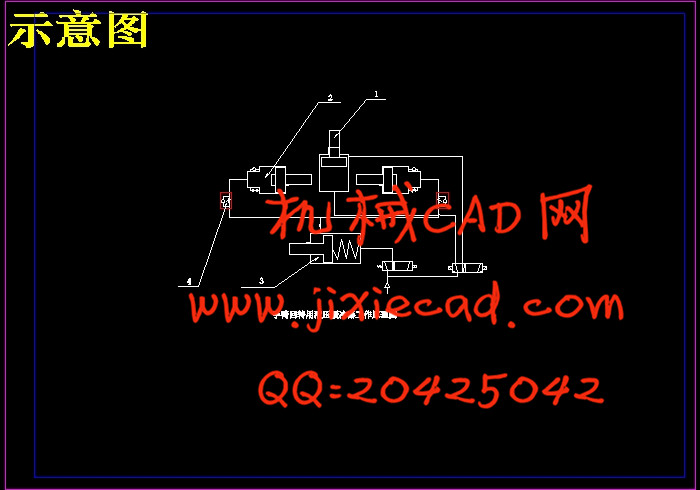
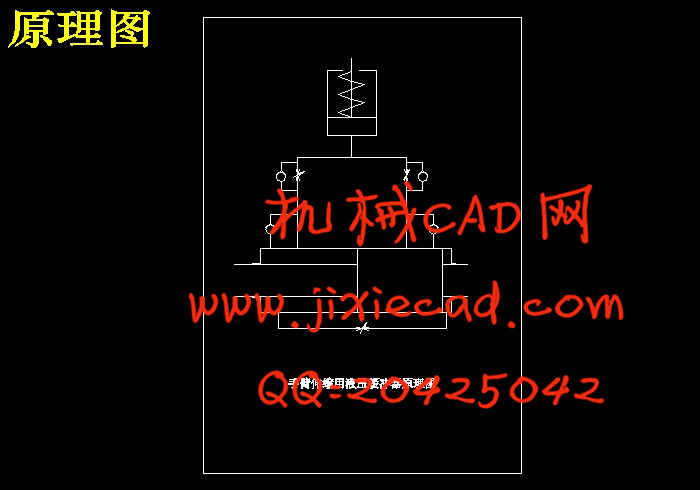
7.1 机械手转动的缓冲结构示意图 31
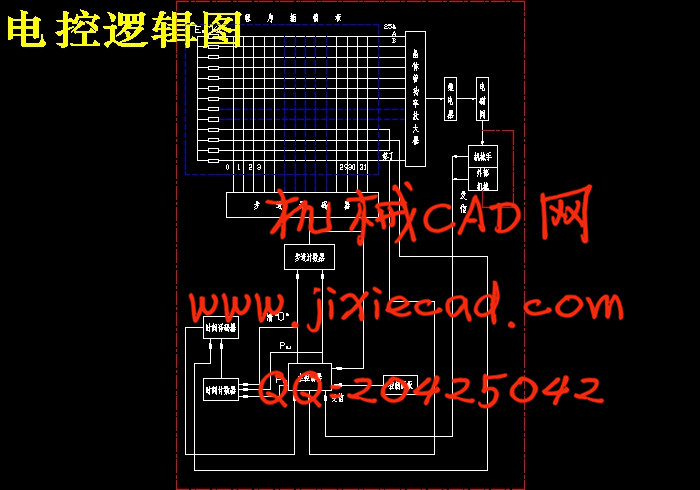
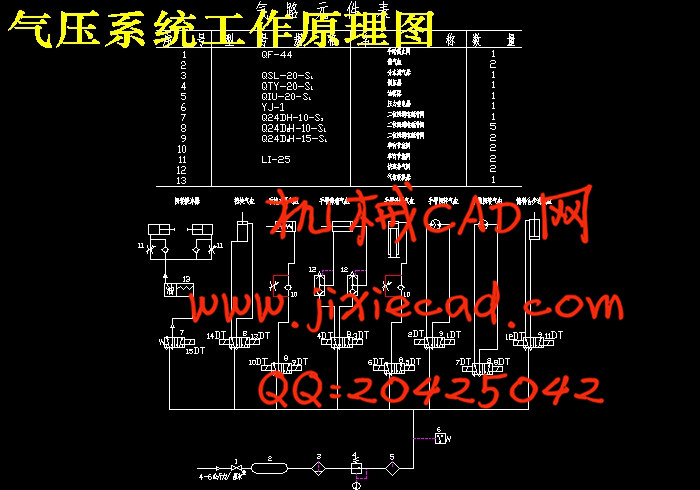
7.2 气压控制原理 31
7.3 模拟机械手的工作流程 32
结 论 34
参考文献 35
致谢 55