设计简介
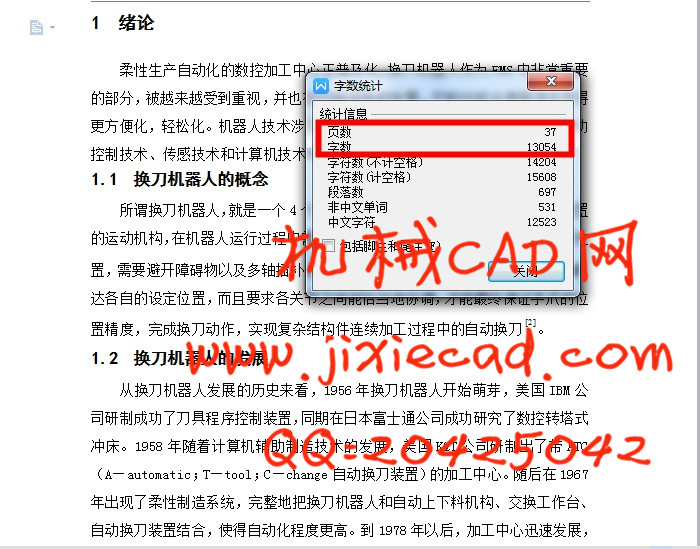
目前柔性制造系统( FMS ) 得到越来越广泛的应用,换刀机器人作为柔性制造中重要的组成部分,也得到了迅速的发展。同时,随着机器人技术的发展,换刀机器人的发展也越来越受关注。
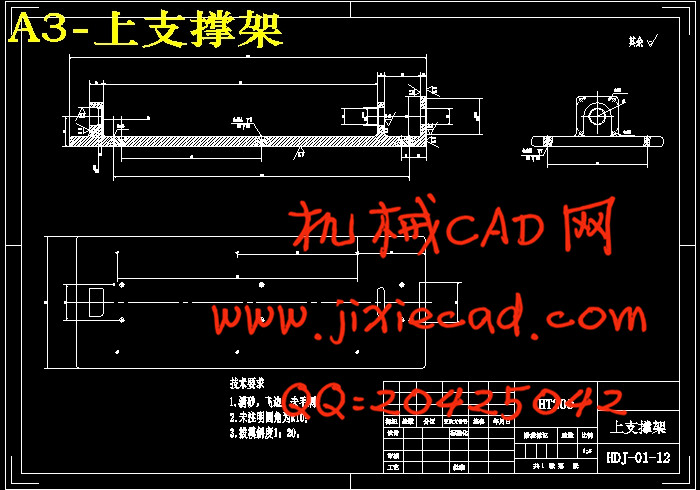
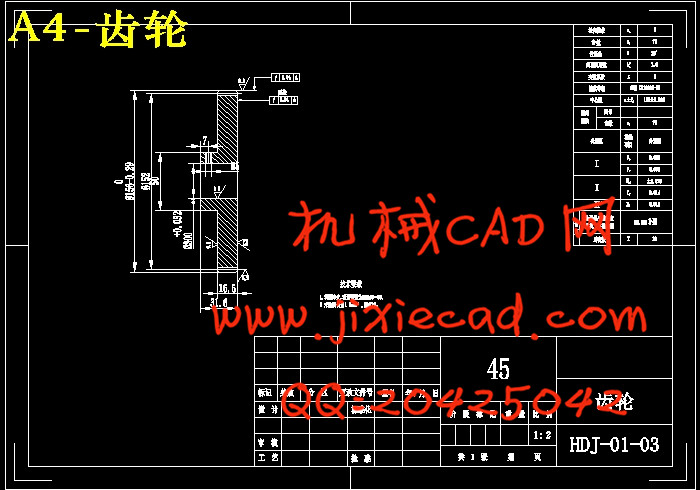
本文主要是换刀机器人的水平移动系统(纵向移动系统和横向移动系统)设计,根据换刀机器人的工作空间分析和工业领域的应用,从而确定其结构形式,纵向移动系统采用滚动导轨和齿轮齿条的传动方式,横向移动系统采用滚动导轨和滚珠丝杠副传动方式使换刀机器人的优势得到充分发挥,同时结合伺服控制原理和各种辅助方式保证了机械系统的设计精度,达到工业运用的要求。
关键词 换刀机器人 纵向移动系统 横向移动系统 滚动导轨 齿轮齿条 滚珠丝杠
Abstract
Now FMS(Flexible Manufacturing System) has been used more widely than before . As an important component part of flexible manufacturing system , the tool exchange robot has been rapidly developed . And with the development of robot technology , more attention will be taken at the development of the tool exchange robot .
How to design the horizontal movement (the longitudinal mobile system and the vertical mobile system) of tool exchange robot and the appliance in the industry , the form of structure of the longitudinal mobile system is confirmed using rolling rail and toothed rack to transmit . The form of structure of the vertical mobile system is confirmed using rolling rail and ball screws to transmit , the advantages of tool exchange robot are brought into play fully . Meanwhile combing the servo control systems and sorts of assistant modes , the design precision is made actually , thus qualifying for the application in the industry .
Keywords Tool-change robot Longitudinal mobile system Lateral mobile system Rolling rail Gear-rack drive Ball screws
目次
1绪论…………………………………………………………………………… 1
1.1换刀机器人的概念…………………………………………………………… 1
1.2换刀机器人的发展…………………………………………………………… 1
1.3课题研究的意义……………………………………………………………… 2
2换刀机器人的总体设计……………………………………………………… 3
2.1换刀机器人的组成及各部分关系概述……………………………………… 3
2.2换刀机器人的设计分析……………………………………………………… 4
3换刀机器人的机械系统设计………………………………………………… 8
3.1换刀机器人的运动系统分析……………………………………………… 8
4水平系统的设计………………………………………………………………10
4.1伺服系统方案设计……………………………………………………………10
4.2传动系统的设计………………………………………………………………15
5导轨的设计……………………………………………………………………26
5.1纵向导轨设计…………………………………………………………………26
5.2横向导轨设计…………………………………………………………………31
6联轴器的选择…………………………………………………………………34
结论………………………………………………………………………………35
致谢………………………………………………………………………………36
参考文献…………………………………………………………………………37
本文主要是换刀机器人的水平移动系统(纵向移动系统和横向移动系统)设计,根据换刀机器人的工作空间分析和工业领域的应用,从而确定其结构形式,纵向移动系统采用滚动导轨和齿轮齿条的传动方式,横向移动系统采用滚动导轨和滚珠丝杠副传动方式使换刀机器人的优势得到充分发挥,同时结合伺服控制原理和各种辅助方式保证了机械系统的设计精度,达到工业运用的要求。
关键词 换刀机器人 纵向移动系统 横向移动系统 滚动导轨 齿轮齿条 滚珠丝杠
Abstract
Now FMS(Flexible Manufacturing System) has been used more widely than before . As an important component part of flexible manufacturing system , the tool exchange robot has been rapidly developed . And with the development of robot technology , more attention will be taken at the development of the tool exchange robot .
How to design the horizontal movement (the longitudinal mobile system and the vertical mobile system) of tool exchange robot and the appliance in the industry , the form of structure of the longitudinal mobile system is confirmed using rolling rail and toothed rack to transmit . The form of structure of the vertical mobile system is confirmed using rolling rail and ball screws to transmit , the advantages of tool exchange robot are brought into play fully . Meanwhile combing the servo control systems and sorts of assistant modes , the design precision is made actually , thus qualifying for the application in the industry .
Keywords Tool-change robot Longitudinal mobile system Lateral mobile system Rolling rail Gear-rack drive Ball screws
目次
1绪论…………………………………………………………………………… 1
1.1换刀机器人的概念…………………………………………………………… 1
1.2换刀机器人的发展…………………………………………………………… 1
1.3课题研究的意义……………………………………………………………… 2
2换刀机器人的总体设计……………………………………………………… 3
2.1换刀机器人的组成及各部分关系概述……………………………………… 3
2.2换刀机器人的设计分析……………………………………………………… 4
3换刀机器人的机械系统设计………………………………………………… 8
3.1换刀机器人的运动系统分析……………………………………………… 8
4水平系统的设计………………………………………………………………10
4.1伺服系统方案设计……………………………………………………………10
4.2传动系统的设计………………………………………………………………15
5导轨的设计……………………………………………………………………26
5.1纵向导轨设计…………………………………………………………………26
5.2横向导轨设计…………………………………………………………………31
6联轴器的选择…………………………………………………………………34
结论………………………………………………………………………………35
致谢………………………………………………………………………………36
参考文献…………………………………………………………………………37