设计简介
目 录
第1章 绪论……………………………………………………………………… 1
1.1 课题研究目的及意义……………………………………………………… 1
1.2 国内外机械手研究概况…………………………………………………… 1
1.3 课题研究的内容和预计达到目的………………………………………… 2
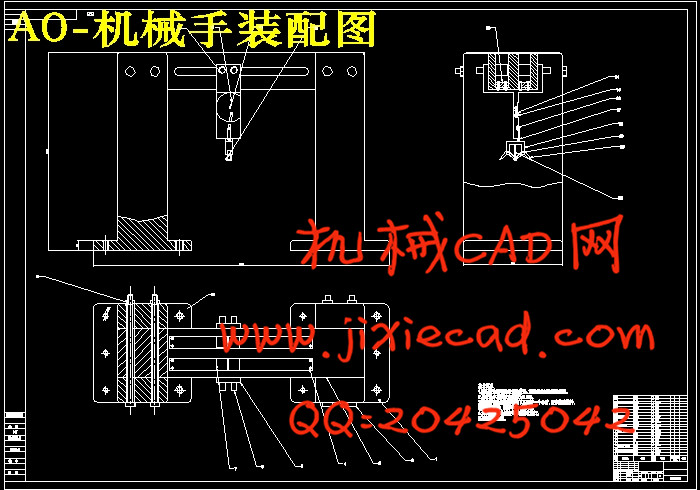
第2章 机械手介绍……………………………………………………………… 3
2.1 机械手驱动系统选型……………………………………………………… 3
2.2 机械手控制系统选型……………………………………………………… 5
第3章 S7-200系统的基本介绍………………………………………………… 8
3.1 S7-200硬件系统基本构成………………………………………………… 8
3.2 S7-200PLC内部资源……………………………………………………… 9
第4章 电机和传感器选择……………………………………………………… 11
4.1 电机选择…………………………………………………………………… 11
4.2 传感器选择………………………………………………………………… 12
第5章 控制部分设计………………………………………………………………14
5.1 电机正反转的实现………………………………………………………… 14
5.2 PLC程序编写……………………………………………………………… 15
5.3 PLC程序调试……………………………………………………………… 24
第6章 总结……………………………………………………………………… 26
致谢………………………………………………………………………………… 27
主要参考文献……………………………………………………………………… 28
第1章 绪论……………………………………………………………………… 1
1.1 课题研究目的及意义……………………………………………………… 1
1.2 国内外机械手研究概况…………………………………………………… 1
1.3 课题研究的内容和预计达到目的………………………………………… 2
第2章 机械手介绍……………………………………………………………… 3
2.1 机械手驱动系统选型……………………………………………………… 3
2.2 机械手控制系统选型……………………………………………………… 5
第3章 S7-200系统的基本介绍………………………………………………… 8
3.1 S7-200硬件系统基本构成………………………………………………… 8
3.2 S7-200PLC内部资源……………………………………………………… 9
第4章 电机和传感器选择……………………………………………………… 11
4.1 电机选择…………………………………………………………………… 11
4.2 传感器选择………………………………………………………………… 12
第5章 控制部分设计………………………………………………………………14
5.1 电机正反转的实现………………………………………………………… 14
5.2 PLC程序编写……………………………………………………………… 15
5.3 PLC程序调试……………………………………………………………… 24
第6章 总结……………………………………………………………………… 26
致谢………………………………………………………………………………… 27
主要参考文献……………………………………………………………………… 28