设计简介
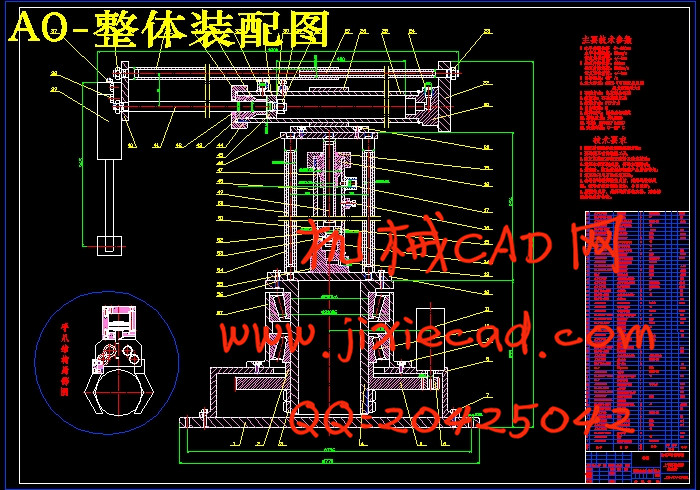
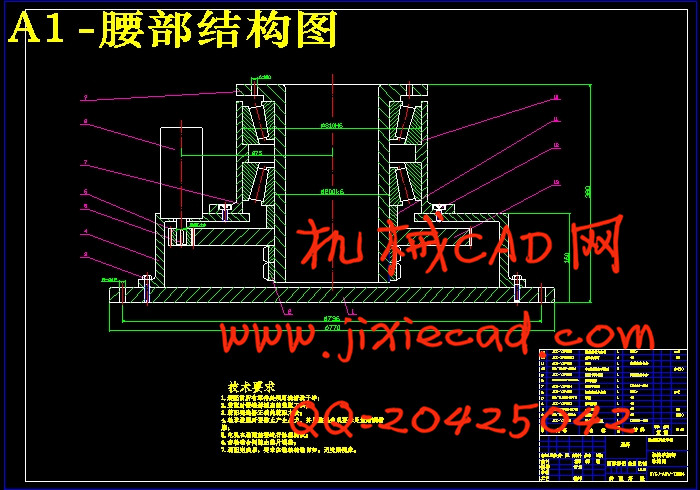
腰座回转的驱动形式要么是电机通过减速机构来实现,要么是通过摆动液压缸或液压马达来实现,目前的趋势是用前者。因为电动方式控制的精度能够很高,而且结构紧凑,不用设计另外的液压系统及其辅助元件。考虑到腰座是机器人的第一个回转关节,对机械手的最终精度影响大,故采用电机驱动来实现腰部的回转运动。一般电机都不能直接驱动,考虑到转速以及扭矩的具体要求,采用大传动比的齿轮传动系统进行减速和扭矩的放大。因为齿轮传动存在着齿侧间隙,影响传动精度,故采用一级齿轮传动,采用大的传动比(大于100),同时为了减小机械手的整体结构,齿轮采用高强度、高硬度的材料,高精度加工制造,尽量减小因齿轮传动造成的误差。