设计简介
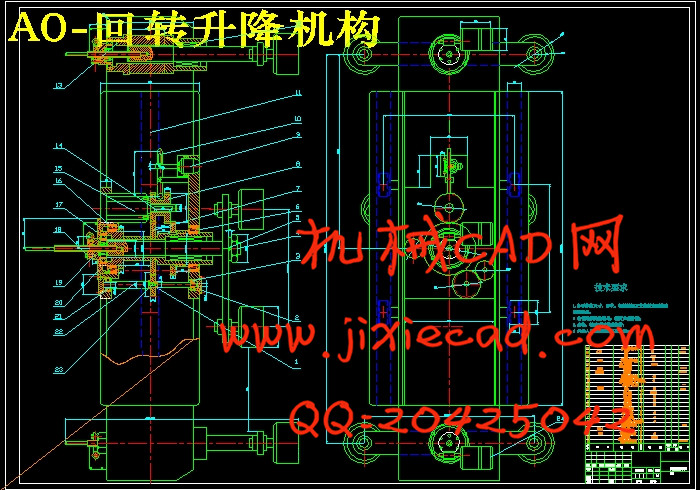
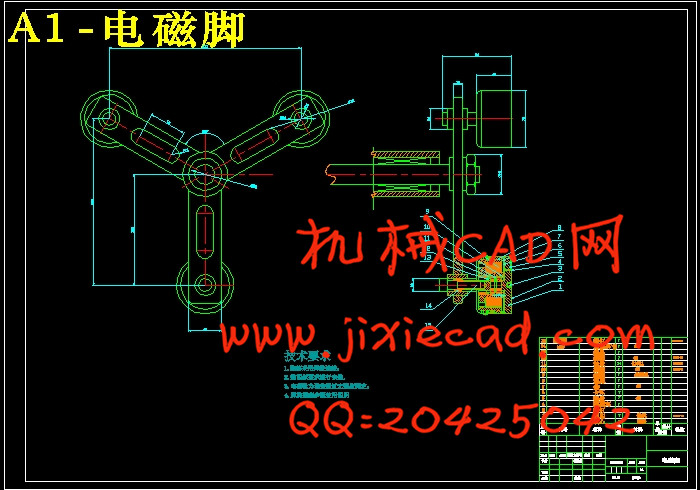
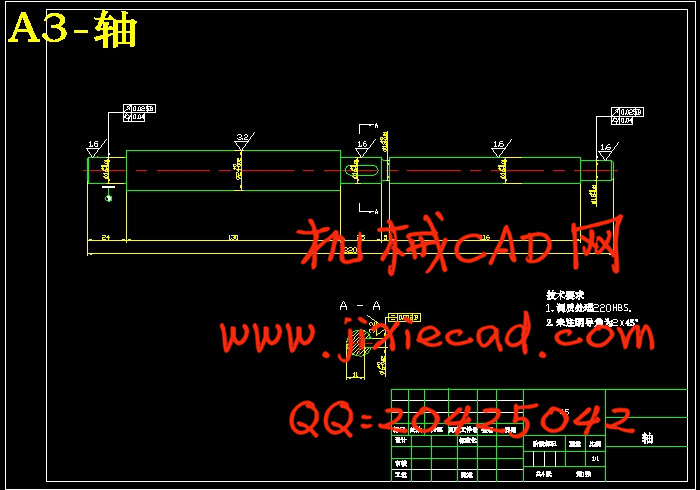
摘 要:本文介绍了检测用攀行机器人的主要结构设计。检测用攀行机器人主要由吸附机构、移动机构及检测装置构成,本文重点介绍吸附机构和移动机构,主要内容包括:吸附机构、移动机构设计方案的分析及确定,机械结构中各功能部件的设计,驱动电机及其安装方式的确定,重要零部件的强度校核等。
关键词:设计方案;强度校核;吸附机构;移动机构
Abstract: The design of the main structure of the detection using climbing robot was introduced in this article. Line detection using climbing robot is mainly composed of adsorption mechanism, mobile mechanism and a detection device, this article focuses on mobile mechanism, adsorption mechanism and the main content includes: adsorption mechanism, mobile mechanism analysis and determine the design scheme, the mechanical structure of each functional unit in the design, the determination of drive motor and its installation method, the strength of the important parts for check, etc.
Key words:Function parts;Intensity compute; adsorption mechanism; travel mechanism
关键词:设计方案;强度校核;吸附机构;移动机构
Abstract: The design of the main structure of the detection using climbing robot was introduced in this article. Line detection using climbing robot is mainly composed of adsorption mechanism, mobile mechanism and a detection device, this article focuses on mobile mechanism, adsorption mechanism and the main content includes: adsorption mechanism, mobile mechanism analysis and determine the design scheme, the mechanical structure of each functional unit in the design, the determination of drive motor and its installation method, the strength of the important parts for check, etc.
Key words:Function parts;Intensity compute; adsorption mechanism; travel mechanism