设计简介
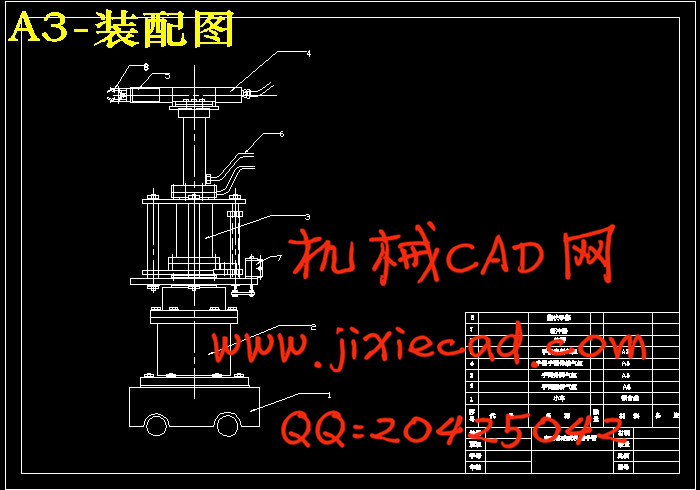
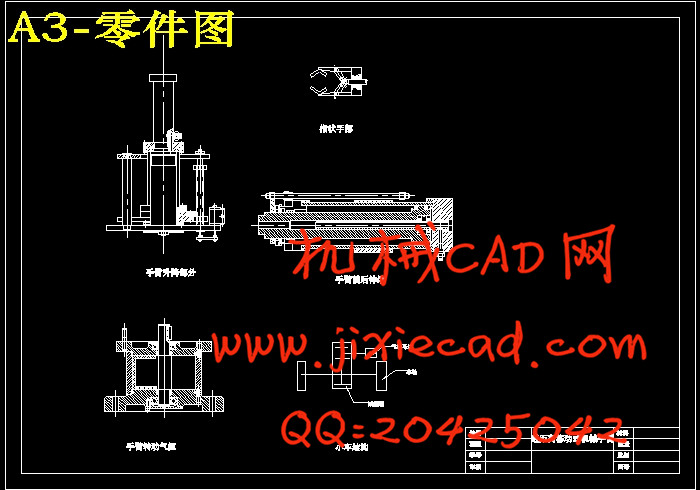
机械手是能够模仿人手动作,并按设定程序、轨迹和要求代替人手抓(吸)取、搬运工件或工具或进行操作的自动化装置,它能部分的代替人的手工劳动。较高级型式的机械手,还能模拟人的手臂动作,完成较复杂的作业。在机械制造业中,机械手已被广泛应用,从而大大地改善了工人的劳动条件,显著的提高劳动生产率,加快实现工业生产机械化和自动化的步伐。在我国,工业机械手近年来有较快的发展,投入了大量的人力物力加以研究和应用,并且很好的效果。本课题主要研究的问题是“近距离自动移动式机械手臂设计——气压驱动式”。设计包括两大方面,其中之一是自动行走部分,另一部分为手臂的运转。采用同一驱动能源——气泵。行走部分可以采用气压马达带动两轮转动。气压泵固定在某处,用一根软管将泵与马达相连,马达安装在行走装置中。运动手臂的直线运动用气缸来实现,旋转运动用气压马达来实现。行走的时候手臂不动,手臂运动的时候,行走部分停止运动。
 关键词 机械手 气压驱动 自动移动 气泵
关键词 机械手 气压驱动 自动移动 气泵
Abstract
Manipulator is to be able to imitate manpower movement, and according to set program, locus and requirement substitute manpower to grab (inhale), take things or tool or the automation installation that operated, it can be partial to replace the handwork labor of person. The manipulator of higher level type can still imitate the arm movement of person,completes more complex work. In mechanical manufacturing industry, manipulator has been applied extensively,so improved the labor condition of worker greatly, raising labor productivity notably, quickly realize the step of industrial production mechanization and automation. In our country, industrial manipulator has more rapid development in recent years, have put in plenty of manpower material resources to study and apply,and get very good effect. The problem of this program major research is “the design of manipulator arm moving automatically in close range -- the drive of atmospheric pressure ”. Design includes two big aspects, one is pushcart move part,the other is the operation of arm. They both With same drive energy -- air pump. Walk part can drive two wheels to turn with the motor of atmospheric pressure. The pump of atmospheric pressure fixed in certain place, use a flexible tube linked the pump and motor, motor installation in walk part. The movement of arm in straight line realizes with cylinder, revolving movement realizes with the motor of atmospheric pressure. Walking arm do not move, when the arm moving, walk part stop sport.
Keywords Manipulator The drive of atmospheric pressure Automatic movable Air pump
Manipulator The drive of atmospheric pressure Automatic movable Air pump
目 次
1引言(或绪论)………………………………………………………………… 1
1.1 机械手及其组成 ……………………………………………………………… 1
1.2机械手的分类………………………………………………………………… 2
1.3应用机械手的意义………………………………………………………………… 3
1.4机械手的发展概况………………………………………………………………… 3
2机械手的设计…………………………………………………………… 5
2.1机械手设计的总体方案……………………………………………………………5
2.2机器人的规格参数…………………………………………………………………6
2.3气动部件设计的简要分析………………………………………………………… 7
3机械手的计算………………………………………………………… 17
3.1设计手臂结构应注意的问题………………………………………………………17
3.2小车的设计及计算………………………………………………………… 23
4机械手臂的工作原理………………………………………………………… 21
4.1气动原理图………………………………………………………… 25
4.2电磁铁动作程序表………………………………………………………… 27
4.3机械手的缓冲和定位………………………………………………………… 28
结论 ………………………………………………………………………………… 29
致谢 ………………………………………………………………………………30
参考文献……………………………………………………………………………31
附录A 装配图 ………………………………………………………… 28
附录B 零件图 ………………………………………………………… 28
Abstract
Manipulator is to be able to imitate manpower movement, and according to set program, locus and requirement substitute manpower to grab (inhale), take things or tool or the automation installation that operated, it can be partial to replace the handwork labor of person. The manipulator of higher level type can still imitate the arm movement of person,completes more complex work. In mechanical manufacturing industry, manipulator has been applied extensively,so improved the labor condition of worker greatly, raising labor productivity notably, quickly realize the step of industrial production mechanization and automation. In our country, industrial manipulator has more rapid development in recent years, have put in plenty of manpower material resources to study and apply,and get very good effect. The problem of this program major research is “the design of manipulator arm moving automatically in close range -- the drive of atmospheric pressure ”. Design includes two big aspects, one is pushcart move part,the other is the operation of arm. They both With same drive energy -- air pump. Walk part can drive two wheels to turn with the motor of atmospheric pressure. The pump of atmospheric pressure fixed in certain place, use a flexible tube linked the pump and motor, motor installation in walk part. The movement of arm in straight line realizes with cylinder, revolving movement realizes with the motor of atmospheric pressure. Walking arm do not move, when the arm moving, walk part stop sport.
Keywords
目 次
1引言(或绪论)………………………………………………………………… 1
1.1 机械手及其组成 ……………………………………………………………… 1
1.2机械手的分类………………………………………………………………… 2
1.3应用机械手的意义………………………………………………………………… 3
1.4机械手的发展概况………………………………………………………………… 3
2机械手的设计…………………………………………………………… 5
2.1机械手设计的总体方案……………………………………………………………5
2.2机器人的规格参数…………………………………………………………………6
2.3气动部件设计的简要分析………………………………………………………… 7
3机械手的计算………………………………………………………… 17
3.1设计手臂结构应注意的问题………………………………………………………17
3.2小车的设计及计算………………………………………………………… 23
4机械手臂的工作原理………………………………………………………… 21
4.1气动原理图………………………………………………………… 25
4.2电磁铁动作程序表………………………………………………………… 27
4.3机械手的缓冲和定位………………………………………………………… 28
结论 ………………………………………………………………………………… 29
致谢 ………………………………………………………………………………30
参考文献……………………………………………………………………………31
附录A 装配图 ………………………………………………………… 28
附录B 零件图 ………………………………………………………… 28