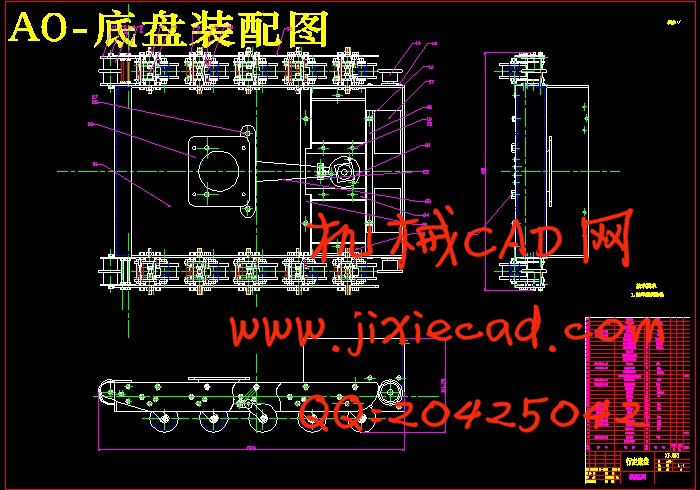
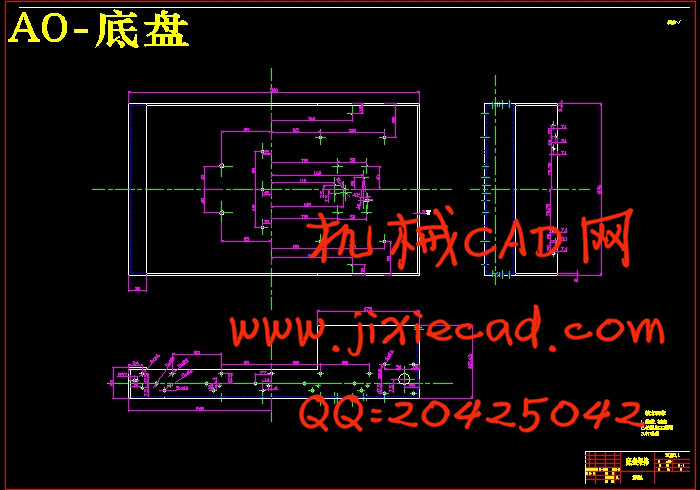
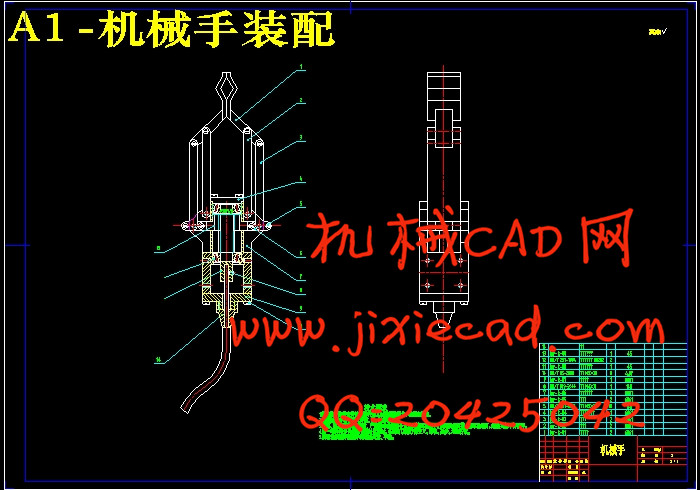
What this design was a section of marching fire robot foundation level carrier, the design content walks the chassis including the design and the four degrees-of-freedom arms as well as has made the concrete analysis to robot's partial stress situation. Trial manufacturing overall robot structure. In the design trial manufacturing process, the unceasing observation analyzes other robot's structure, absorbs the predecessor to experience, carries on the plan quite to designate. And goes down to the factory to process one to carry on the study, brings to completion the processing technique of manufacture, avoids stepping onto only pauses the written design to be separated from the actual manufacture the tortuous path.
This graduation project's key point lies in robot's trial manufacturing research work, because the robot whole's design difficulty is big, the material and the organization accuracy requirement is high, this trial manufacturing product has not been able to take the mature product to carry on adds the manufacture, can only do for the guidance prototype supplies the reference.
Key words: Robot; Caterpillar band chassis; Mechanical arm; Control circuit